Home > ニュースレター バックナンバー > ニュースレター37号 > 研究室紹介
研究室紹介
我々の研究室では,非侵襲/低侵襲の医療と患者本位の福祉の実現を目指し,主に医療・福祉の分野におけるロボット工学に関する研究を行っています.当研究室は工学系研究科先端融合工学専攻に所属しており,当研究室での研究成果は先端融合工学専攻の医工学コースでの教育にも反映させています.医療用のロボットシステムの研究では,人間の関節運動シミュレータや内視鏡手術シミュレータ等の研究開発を行っています.また,福祉用のロボットシステムの研究では,外骨格型パワーアシストロボットや筋電義手等の研究開発を行っています.また,それらの研究を進める上で人間−ロボットインターフェイスが重要となるため,生体信号と動作意思の関係をモデル化する研究も進めています.当研究室では,実用を視野に入れた研究を行うため,国内外の企業や他大学との共同研究も積極的に進めています.
研究内容
・関節シミュレータ
和式生活に適した可動範囲の広い人工股関節および人工膝関節の研究開発を行うため,人間の膝関節および股関節の運動を生成するシミュレータを開発し,人工関節の評価や関節運動の解析を行っています.特に股関節シミュレータ(図1)は,関節運動と関節間力を同時に制御できるものであり,関節周りの筋力等の力覚条件も考慮した運動を生成することも可能です.現在,本股関節シミュレータを用いて人工股関節の脱臼メカニズムの解析を行っています.

図1 股関節運動シミュレータ
・外骨格型パワーアシストロボット
筋力弱者の日常生活動作やリハビリテーションを支援するため,人体に直接装着し,装着者の動作を補助する外骨格型パワーアシストロボットの研究を進めています.図2に上肢運動補助用,図3に下肢運動補助用の外骨格型パワーアシストロボットを示します.これらのロボットは基本的に装着者の複数個所の筋電信号(筋肉が収縮する際に発生する電気信号)を基にリアルタイムで装着者の動作推定を行い,装着者の動作意思通りの運動が生成できるよう補助するものです.
また,筋力弱者の中には視力の低下など環境認知能力も衰えている場合も少なくないため,ロボットが装着者と環境とのインタラクションをモニターし,装着者の動作に問題や危険性が見られた場合には,ロボットが自動的に装着者の動作を補正する手法(認知アシスト)の研究も進めています.例えば,装着者が段差を超えようとしている際に,装着者のつま先が段差にぶつかるとロボットが判断した場合は,装着者の転倒を防止するため,自動的に装着者の足の高さを補正します.
 |
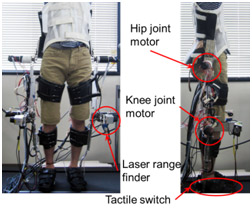 |
| 図2 上肢パワーアシストロボット | 図3 下肢パワーアシストロボット |
・筋電義手
事故や病気等で腕を切断した人に装着する多自由度の筋電義手の研究を行っています.義手を装着者の思い通りに動かすため,基本的には装着者の残存筋肉で発生させる筋電信号を基に制御しますが,多自由度を制御する場合は残存する筋肉の筋電信号だけでは情報が足りないため,装着者の肩運動を参考にして装着者の動作意思を推定する研究を行っています.また,より自然な運動を生成するため,肩の運動と連動させる手法も用いています.
・その他
人工関節をロボット化(アクチュエータ化)し,体内に埋め込み,体の内部からパワーアシストを行う内骨格型パワーアシストロボットの研究や,内視鏡手術シミュレータを構築するために必要な動作およびプロパティのモデリングに関する研究も進めています.
その他詳細は,研究室HPアドレス: http://web.me.saga-u.ac.jp/~kiguchi/biorobot.html へお越し下さい.