18. ロボティクス・メカトロニクス
18.1 総論
18.2 産業用ロボット,サービスロボットの安全
18.3 ロボットミドルウェアの動向
18.4 産業用ロボット業界における動向
18.5 サービス産業を中心としたロボット実装動向
18.6 建設分野でのロボット動向
18.7 スマート農業をはじめとした農林水産業におけるAI,ロボット動向
18.1 総論
IoT,AI,5Gなどの新技術,新概念が次々と発表され,実用化を目指した研究開発が活発に行われ,ロボットも従来のスタンドアローンのサービス形態から,インターネットにつながり,社会システムのエッジデバイスの一つとしてサービスを行うことが予想される.特に少子高齢化社会の労働者不足における労働生産性低下に対しては,ロボットの活用は,産業を発展させていく原動力となるであろう.本項では2020年にロボティクス・メカトロニクス分野で話題となった出来事,研究動向を中心に紹介する.
まず,少子高齢化による労働生産人口の低下から,労働者不足がより顕著になってきており,今まで工場の囲われた空間から,人の生活の中にロボットを活用されるようになってきている.加えて,工場の中においても,人と協働するするロボットの活用が期待され,安全を担保する仕組み作りの重要性は増している.さらに近年では,ブラックボックスと言われるAIが活用される中で,どのように信頼性あるシステムとするのか等,現在のロボットの安全の仕組み作りについて,国際標準化の活動を通じて紹介する.
また,ロボティクス・メカトロニクス分野では,RT-MiddlewareやROSなどのソフトウエアプラットフォームやオープンソースソフトウエアを積極的に活用され,ロボットの開発工程が大きく変化してきている.さらに,ロボット自体もスタンドアローンで活用することはなく,クラウド等とつながりサービスシステムの一つのエッジデバイスとして活用されていくであろう.その意味でも,他のシステムとの統合は重要であることから,オープンソースソフトウエア,ロボットミドルウェアの動向について紹介する.
海外のロボットメーカが台頭してきている中,機械生産関連の工場だけで無く,物流や食品加工工場等,活用の場を広げていくことが求められている.システムとしても,画像処理や,クラウドとの連携等,一社だけでは,多様なシステムインテグレーションが困難となってきている中,オープンイノベーションの一端として,産業ロボットメーカ同士が手を組み,業界の底上げを行う活動が開始され,技術組合が発足された.この技術研究組合 産業用ロボット次世代基礎技術研究機構(略称:ROBOCIP)について紹介する.
産業ロボット以外の大きな実用化の流れとして,昨今のコロナ禍によっても大きく活用が期待されているロボットとして,搬送ロボットが挙げられる.Eコマース等で需要が増し,一方で,供給側の物流現場での労働者不足の課題が大きくなっているなか,屋外走行も含む自律移動を実現可能とする搬送ロボットおよびその制度構築は喫緊の課題となっている.現在の搬送ロボットを中心としたサービス産業におけるロボットの動向を紹介する.
労働者不足の課題は建設業でも重要であり,その上で,ICT, IoT, AIを活用した建築現場のDX化は工場のDX化と同様,i-Constructionというキーワードで大きく期待されている.近年,様々なロボットが建設現場で活用されつつあり,その動向を紹介する.
農業の分野も建設業界と同様,労働者不足の課題は大きい.加えて,多くのノウハウの中での生産性向上が図られてきていることから,機械化の難しい分野と言える.一方,AI技術に代表される情報に基づいた科学的根拠に基づく農業を目指し,スマート農業というキーワードで農水省が積極的に支援を行っている.その中で期待されるロボットの動向について紹介する.
〔谷川 民生 (国研)産業技術総合研究所〕
18.2 産業用ロボット,サービスロボットの安全
少子高齢化による労働力不足の深刻化や新型コロナウイルスの影響による外国人労働者の入国制限,あるいは非接触や非対面でのサービスニーズの高まりにより,従来にも増してサービスロボットや産業用ロボットの利用拡大,および農業,建築などでの利用が始まっている.特に人協働ロボット,装着型ロボット,SLAMによる自律移動台車などをいわゆる未活用領域で活用する場合に鍵となるのが安全性の確保である.
新しいアプリケーションや領域では従来の安全の基準や経験が役に立たず,関連する安全規格や基準を参照して新たなルールを作る必要がある.そうした動向を受けて,安全関連の標準化も活発化している.ロボットの標準化はISO/TC299 – Roboticsが主となり,特にWG2 Service robot safety,WG3 Industrial safetyにて,従来のISO13482:2014サービスロボット,ISO10218:2011産業用ロボットの安全規格に対して,それぞれISO/TR 23482-1:2020やISO/DIS 10218-2などにより,例えば装着型ロボットや協働ロボットなどを対象とした改訂や拡充が進んでいる.またISO/TC110/SC 2ではAGVの標準化が,IEC/TC44では安全センサに関する標準化が行われている.
こうした従来の延長線上での取り組みに加えて,あらたな活動も始まっている.2019年に発行したJIS Y 1001は,これまでのサービスロボット本体の安全から,新たにその運用の際のサービスの安全にフォーカスをあてた規格であったが,2020年10月にはISO/TC299/WG 7 Management system for service robotsが立ち上がり,日本が議長,シンガポールが共同リーダーとなってNP5124として審議を開始した.
一方,産業分野でも各国の意見を入れたIEC White Paper Safety in the future:2020 が発行され,その趣旨を踏まえて日本からのSafety 2.0の活動を中心に,これまでのガイド51に示された人と機械の隔離に基づく安全の原則から,AIなどを導入して機械が人を理解し,より安全に共存,協働することを目指すための新しいIECガイドの提案も行われている.関連して2020年から延期となっていたSIAS2021やVision Zeroサミットなどの関連学会,イベントも予定されている.
最後に関連分野の動きとして,ロボットの自律制御や安全も含めたセンシングに不可欠な要素となる機械学習,AIについて,AIプロダクト品質保証コンソーシアム (QA4AI)から「AI安全品質保証 AIプロダクト品質保証ガイドライン」が,産総研から「機械学習品質マネジメントガイドライン」が公表された.いずれもAIの安全性,品質保証について正面から取り組む内容である.国際標準化についてはISO/IEC JTC 1/SC42にて鋭意進められている.それ以外に農業分野では農水省から「農業機械の自動走行に関する安全性確保ガイドライン」が,公道走行する自動配送ロボットについては,経産省を中心として国交省や警察庁も参加する「自動走行ロボットを活用した配送の実現に向けた官民協議会」にて安全に関するルール化が行われている.また小型ドローンについてNEDO・DRESSプロジェクトが,それ以外にもRRI WG2,WG3などでも様々な検討が進められており,経産省ロボット政策室が提唱する,ロボットフレンドリーな社会にむけて,各所で安全についての環境整備に緊急かつ積極的に取り組んでいる状況である.それぞれ注視が必要であろう.
〔中坊 嘉宏 (国研)産業技術総合研究所〕
18.3 ロボットミドルウェアの動向
ロボットミドルウェアは,ロボットシステムの構築を効率化するためのソフトウェア基盤であり,これを利用することで,ソフトウェアのモジュール化・再利用や組み換えのみならず,ロボットシステムに於いて必要となる,リアルタイム実行やネットワーク通信等が容易することが可能となる.主なロボットミドルウェアとしてRTミドルウェア(RTM),ROS,OPRoS,OROCOS等が知られている(1)が,ここでは,RTM,ROSおよびその新バージョンであるROS2について最近の動向を概説する(表18-3-1).
RTミドルウェア: OpenRTM-aistは主に(国研)産業技術総合研究所が開発するロボットミドルウェアである(2).OMG標準に準拠したインターフェース(3),Execution Contextと呼ばれる実行機構によるリアルタイム実行・複合化機能,グラフィカル開発環境,複数の(リアルタイムOSを含む)OS,複数の言語(C++, Java, Python, 3rd party版Lua, C#),複数のプロトコル(CORBA,ROS,ROS2やMQTT等,2.0版の機能)が利用できる等の特長がある.
ROSは米国のベンチャー企業 Willow Garageにより2007年頃から開発されているミドルウェアである(4).現在は,Open Roboticsへと引き継がれコミュニティととともに開発を継続している.ROSは,UNIX文化に根差した開発・操作法を採用,ロボットシステム可視化ツール:Rvizをはじめとする多くのツール群に加え,移動ロボット用パッケージ Navigation Stack や,アーム用パッケージ MoveIt! 等の膨大なパッケージがバイナリパッケージとして利用可能であることが特長である.
ROSに不足していたリアルタイム実行や,Linux以外のOSサポートのため,2014年ごろから新バージョンROS2の開発が開始された.組込み向けの構造の導入,ロジック実行の柔軟性向上やノードの複合化,リアルタイム実行のためのExecutorの導入,サポートOSの追加(Windows,Mac OS X等)等が行われた.現状ではROS2への移行も進みつつあるもののROSのユーザも依然として多く,ROSでは2020年リリースのNoeticが2025年,ROS2では2020年リリースのFoxyが2023年までのサポートを表明しており,両者が併存する形で開発・利用が進められている.
表18-3-1 RTミドルウェア,ROS,ROS2の比較
| OpenRTM-aist | ROS | ROS2 | |
| オープンソース | ○ | ○ | ○ |
| ライセンス | LGPL | BSD | Apache 2.0 |
| リアルタイム性 | ○ | × | ○ |
| 通信 | CORBA (OMG標準) +
ROS/ROS2(DDS)等 |
ROSTCP (独自) | DDS (OMG標準) |
| モジュール管理 | OMG準拠RTCモデル | なし | Life cycle node |
| 複合化 | ○ | × | ○ |
| サポートOS | Windows, Linux, MacOS X, VxWorks, QNX | Linux
(サードパーティのWindows版等もあり) |
Linux, Windows, Mac OS X |
〔安藤 慶昭 (国研)産業技術総合研究所〕
参考文献
(1)Gergely Magyar, Peter Sincak, Zoltán Krizsán, “Comparison Study of Robotic Middleware for Robotic Applications”, Advances in Intelligent Systems and Computing, DOI: 10.1007/978-3-319-10783-7_13.
(2)OpenRTM-aist Official Website: https://openrtm.org (参照日 2020年4月1日)
(3)Robotic Technology Component (RTC) Version 1.1, https://www.omg.org/spec/RTC (参照日 2021年4月1日)
(4)ROS: https://www.ros.org/, http://wiki.ros.org/ (参照日 2021年4月1日)
18.4 産業用ロボット業界における動向
産業用ロボットメーカ6社(2021年3月末時点で9社)は,2020年7月10日に技術研究組合 産業用ロボット次世代基礎技術研究機構(略称:ROBOCIP)を設立した(1).ROBOCIPでは,産業用ロボットの機能向上や導入容易化のために産学連携による基礎技術研究を推進する.
日本の64歳以下の生産年齢人口は減少傾向にある(2).特に中小企業では全産業において単純作業,3K(きつい,汚い,危険)作業,熟練が必要な作業の人材不足が深刻化している(3).この人手不足を解決する一つとして,産業用ロボットによる人作業の機械化が挙げられる.しかし,中小企業へ産業用ロボットを導入するためには,作業対象となるモノを把持するハンドなどの機器を選定し,ロボットを動作させるプログラムを入力するシステムインテグレーション(SI)が必要となる.さらに,中小の製造業やサービス業は,多くの種類の部品(一品一品形状が異なる不定形物の場合もある)を少量ずつ生産するため,産業用ロボットにはより困難な熟練作業を簡単に自動化する能力が求められる.
産業用ロボットを取り巻く世界の動向を見ると,中国では「中国製造2025」等でSIの強化に取り組んでおり,欧州では産学が連携して産業用ロボットを含むロボットのイノベーションの創出が進められている.
ROBOCIPは,2020年10月にNEDO「革新的ロボット研究開発基盤構築事業」に採択された.SIの簡単化や低コスト化,現状の産業用ロボットでは困難な熟練作業のロボット化のために,3つのプロジェクトを立上げ,異分野の技術シーズも取り入れつつ産学連携により機能性,操作性,省エネルギーに優れた要素技術を研究している(図18-4-1).
・プロジェクト1「ハンドリング・汎用動作計画技術」
搬送や組立などを自動化する産業用ロボットシステムにおいて,様々な作業対象物を認識,把持,動作させるハンドリングおよび汎用動作計画技術を開発する.
・プロジェクト2「遠隔制御技術」
溶接や組立などにおいて,自動化が難しい熟練作業を遠隔操縦するために,遠隔操縦に必要なセンサや操縦者の疲労度などを考慮した通信性能評価と性能向上技術を開発する.
・プロジェクト3「ロボット新素材・センサ応用技術」
産業用ロボットの消費電力削減に寄与する軽量化や高性能化を実現する新素材やセンサ実装のための要素技術を開発する.
このように日本でも産業用ロボットの中長期的課題に対応するための産学が連携するR&D体制が構築されており,産業用ロボットの新しいイノベーションが期待される.
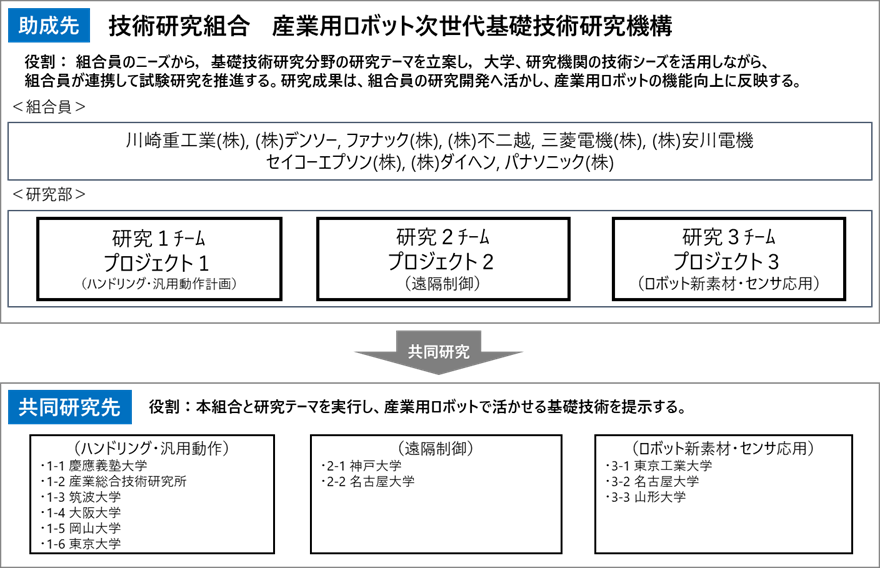 図18-4-1 研究体制
図18-4-1 研究体制
〔馬場 裕康 (株)デンソー〕
参考文献
(1)ROBOCIPホームページ, https://robocip.or.jp/(参照日2021年4月7日)
(2)国立社会保障・人口問題研究所, 日本の将来推計人口.
(3)中小企業庁, 2018年度版中小企業白書.
18.5 サービス産業を中心としたロボット実装動向
2020年は,新型コロナウイルスの影響により,サービスロボット産業も大きな変化が始まった.
特に,「非接触」の観点で搬送ロボットの取組みは飛躍的に加速している.施設内に関しては,飲食店を中心として一気に導入が進んだ.年初は武漢でも活用されていた中国のKeenon Roboticsのロボットが,日本でも活用が始まったという程度だったものが,2020年度後半はソフトバンクロボティクスグループが米国のBear Robotics「Servi」の商品化を発表し,多くのチェーン店などにおいて急激に活用が進んでいる.焼肉店を中心として,300店舗以上導入するという製品リリースは,飲食業においてロボティクス活用が標準的になる日が近い印象を与えた.
また,屋外搬送に関しては,Eコマースの増加やフードデリバリーの増加により,米国(Starship Technologies,Nuroなど)や中国(京東など)が先行していた屋外公道の搬送ロボットの実証が,日本でも開始された.政府としても,閣議決定された成長戦略の中で「遠隔で多数台の小型・低速の自動配送ロボットのサービスが可能となるような関連法案の提出を2021年度の出来るだけ早期に行う」ことを掲げており,日本郵便,楽天,三菱地所などが,ZMP,パナソニックなどのロボットを活用しながら,運用の実証を日本各地で実施した.図18-5-1に示したようにパナソニックは複数台のロボットの同時管制を行うなど実運用を想定した技術的な開発を行ったほか,ZMPはENEOSのガソリンスタンドをロボットの待機場所として活用した複数店舗によるシェアリングの検証を,楽天は西友のネットスーパーと連携した配送の検証を行うなど,実ビジネスを意識した活動が活発化した.
搬送ロボット以外では,avatar-in,オリィ研究所などが,アバターロボットの社会実装を加速した.avatar-inはアバターロボット「newme」を使って,博物館などの遠隔訪問やショップでの遠隔ショッピングなどの実証を行った.また,オリィ研究所は,遠隔にいる外出困難者が,分身ロボット「OriHime」を使って,モスバーガーの実店舗で接客業務を継続的に行うなど,アバター社会に向けた一歩を踏み出した.先端の研究開発としても,大型ナショナルプロジェクトであるムーンショットプロジェクトの中でも『2050年までに,人が身体,脳,空間,時間の制約から解放された社会を実現』が目標とされており,国内外の複数研究者がXR技術とロボティクスを融合させた取組みを開始した.
このほか,新型コロナウイルスが拡大する前から社会実装が進んでいた物流領域は順調にロボット導入を加速させており,国際ロボット連盟の試算では,2020年には約10万台が販売予定である.また,JR東日本グループ会社が海浜幕張駅のそば屋に導入した調理工程の自動化のように協働ロボットの製造業以外への適応も進みつつあり,産業用ロボットを除くB2B領域でのロボットの販売は金額ベースで約1.5兆円となる見込みである(1).
 図18-5-1 屋外公道での配送ロボット実証
図18-5-1 屋外公道での配送ロボット実証
〔安藤 健 パナソニック(株)〕
参考文献
(1)World Robotics Report 2020, International Federation of Robotics
https://ifr.org/ifr-press-releases/news/record-2.7-million-robots-work-in-factories-around-the-globe (参照日 2021年4月12日)
18.6 建設分野でのロボット動向
国土交通省は2016年を「生産性革命元年」と位置付け,総力を挙げ生産性の向上に向け取り組んでいる.その中で重要な施策の一つであるi-Constructionは,調査・測量,設計,施工・調査及び維持管理・更新のあらゆる建設生産プロセスにICT,IoT,AI,空間情報処理技術等を取り入れることで建設現場の生産性を2025年度までに2割向上させることを目指している.この背景には,2025年までに高齢等の理由により約110万人の離職が予想され労働力不足の懸念が大きいことや,若年者を中心とした担い手確保のために賃金水準の向上や安定した休暇の取得等の働き方改革の推進などが挙げられる(1)(2).
建設現場においてロボット活用が進んでいるのは,5Gや3次元データを活用した建設機械の遠隔操縦や自動運転,ドローンによる3次元測量などのICT土工である(3).また,1970年代後半からゼネコン各社で研究・開発された床仕上げや鉄筋組立,内装工事などの建設作業を代替する自動機械やロボットに,近年のSLAMやLiDAR,AIなどのロボティクス・メカトロニクスの技術を適用した新しい建設ロボットが実際に活用されるようになってきている(4).
土木分野では,2020年に鹿島建設とコマツが共同で研究開発を進めている自動化重機によるダム堤体の打設が行われた(5).また,清水建設はIoT,AI技術を活用した次世代型トンネル構築システムの開発に着手しており,地山自動監視や機械・作業員位置などの情報取得,AIによるリスク分析を含む全体システムを2020年度までに完成させる計画である(6).
建築分野では,清水建設が開発する自律型建設ロボットと人が協働し工事を進める次世代型生産システムを建設現場で本格稼働させ,自動搬送ロボットや溶接ロボット,多能工作業ロボットなどにより工事の省力化を図っている(7).また,2020年6月には竹中工務店,鹿島建設,アクティオ,カナモトは,タワークレーン遠隔操作システムを開発し,遠隔操作用コックピットからタワークレーンによる材料移動,積み込み・積み下ろし作業等を行った(8).一方で,2020年5月に鹿島建設は建物の3次元モデルに属性データを付加したBIM(Building Information Modeling)による建物のデジタルツインを実現し,ビル風シミュレーションや工事プロセスのデジタル化などに取り組んでいる(9).
2020年10月には建設ロボットの開発コスト低減や仕様の共通化によって普及を促進し,建設業界全体の生産性および魅力の向上を促進することを目的に鹿島建設,清水建設,竹中工務店の3社がロボット・IoT分野での技術連携に合意した(10).また,日本建設業連合会では,2020年に建築ロボット専門部会を設立し,ロボット技術導入の障壁となっている建設業固有の特殊な環境条件や技術に関連する制約(安全性・法規・基準等)を克服するため,ロボット開発や導入における非競争領域の共通課題について検討している(11).
〔中村 聡 東急建設(株)〕
参考文献
(1)i-Constructionの推進,国⼟交通省, http://www.mlit.go.jp/common/001149595.pdf (参照日2021年4月5日)
(2)i-Construction 小委員会活動報告書(2020年6月),公益社団法人 土木学会 建設マネジメント委員会 i-Construction小委員会, https://committees.jsce.or.jp/cmc0705/system/files/%e6%b4%bb%e5%8b%95%e5%a0%b1%e5%91%8a%e6%9b%b8.pdf(参照日2021年4月5日)
(3)i-Constructionの推進について,国⼟交通省, https://www.mlit.go.jp/common/001170255.pdf(参照日2021年4月5日)
(4)[ICT活用事例]コンクリート床仕上げロボット[T-iROBO® Slab Finisher], 建設業労働災害防止協議会, https://ww w.kensaibou.or.jp/safe_tech/ict/entry/003134.html(参照日2021年4月5日)
(5)成瀬ダム堤体打設工事CSG初打設, 鹿島建設, https://www.kajima.co.jp/tech/civil_engineering/topics/200602.html(参照日2021年4月5日)
(6)IoT,AI技術を活用した次世代型トンネル構築システムの開発に着手, 清水建設, https://www.shimz.co.jp/company/about/news-release/2018/2018020.html(参照日2021年4月5日)
(7)新時代の生産システム 自律型ロボットが連携「シミズ・スマート・サイト」が現場を変える! , 清水建設, https://www.shimz.co.jp/topics/construction/item12/(参照日2021年4月5日)
(8)タワークレーン遠隔操作システム「TawaRemo」を開発, 竹中工務店,
https://www.takenaka.co.jp/news/2020/06/03/index.html(参照日2021年4月5日)
(9)日本初!建物の全てのフェーズでBIMによる「デジタルツイン」を実現, 鹿島建設, https://www.kajima.co.jp/news/press/202005/11a1-j.htm(参照日2021年4月5日)
(10)ロボット施工・IoT分野における技術連携に合意, 清水建設, https://www.shimz.co.jp/company/about/news-release/2020/2020028.html(参照日2021年4月5日)
(11)日刊建設工業新聞,建築ロボット利用促進へ工程表準備, 2021年2月2日2面.
18.7 スマート農業をはじめとした農林水産業におけるAI,ロボット動向
近年のAI技術の期待を受け,様々な業界において,活用が進められてきている.情報的なサービスにおいては,すでに,e-コマースに見られるネットショッピング等のレコメンド機能や翻訳サービスにおいて実用化されており,今後は,ロボット等の物理的なサービスに活用されることになると思われる.自動運転は,社会的にも大きく期待されている分野である.農業においてもトラクターの自動運転というニーズは,特に大規模農業においては従来から期待されており,AI技術が本格的になる前から研究がされてきていた.農林水産省では,実用化を促進すべく,2017年3月に農業機械の自動走行に関する安全性確保ガイドラインが策定され,トラクターの自動運転における運用指針を示し,企業の自動運転トラクターの実用化支援を進めてきた.現在では,ロボット草刈り機,ロボット田植え機など,農業機器の分野を広げた改訂が進んでいる.この頃から,農林水産省では,並行してスマート農業というキーワードで,積極的に農業に先端技術である,ロボット,AI,IoT技術を導入し,生産性向上,業務効率化をより進め,従来,農家の経験則で積み上げられた知見を科学的に分析し,強い農業への後押しにつながる施策を進めてきている(1).
スマート農業の代表的な応用事例は,トラクターや田植機のような乗車型農業機械に対する自動運転の適用が挙げられる.従来,北海道のような大規模な圃場においては,農業機械の大型化によって生産性を向上させているが,その大型化による弊害として土壌圧縮という問題が表面化してきている.豊かな土壌は土の粒子の合間に空気や養分,水分を保ち,微生物など多様な生物相を抱えている.長年重い農機に踏み固められることで,土壌の豊かさが失われる事例が各国でも報告されるようになった.そのため,単純に機械の大型化で大規模化を進めることは困難となっており,農業機械の小型化の方向が進んでいる.一方,農家の就労人口は年々減少しており,人材不足の点から,多数の農業機械を運転する人的リソースが少ないことから,農業機械の小型化に伴い,多数の機械を運用することも人的リソースから困難となると,大規模農業とはいえ,単純に効率化が図られ生産性が向上するという状況ではなくなっている.そこで,自動運転という技術の適用が,前述の課題解決に大きく期待されている.ここでの要素技術として求められる仕様は,不整地における移動制御の精度向上と,圃場内の安全技術である.移動については,基本的にはGPSと角速度・加速度を高精度に計測する慣性計測装置(IMU:Inertial Measurement Unit)との併用になり,特にGPSについては,準天頂衛星システムにより精度向上が期待され,一方で固定局と移動局の2つの受信機で4つ以上の衛星から信号を受信する技術「リアルタイムキネマティック(Real Time Kinematic)」と称されるRTK-GPSシステムが安価になってきていることから,今まで数メートルの誤差が,数センチメートル以内で測位できるようになってきている.これは,一般の自動車やドローンの普及に伴って,社会システムとして導入が進むと期待される.一方,安全技術においては,圃場は私有地であり,一般の自動車の走る道路のような公共空間ではなく,不特定多数の人間が存在するわけではない.そのため,圃場内の管理は制御しやすいが,農業事故の件数はある一定の数は毎年起こっており,特に高齢化が進むことで,高齢者の事故が徐々に増えつつある.そのため,自動化の面だけでなく,AI技術やIoT技術を活用し,安全な農業機械の運用は目指していく必要がある.特に,近年では,家族経営農業が後継者不足で減少する一方,農業生産法人による企業経営型の農業が増えており,その意味で,労働安全という意識をより高めることが必要となっている.
今後,自動運転の運用においては,現時点では,現場の管理者として,運用現場に居ることが義務づけられているが,技術の向上に伴い,遠隔からの管理でも可能であることになると,北海道のような集約化された大規模圃場だけでなく,本州や,さらには中山間地の分散型の圃場においても,自動化が進むことが期待され,搭乗型でない,小型移動ロボットのような農業機械の可能性も見えてくる.その可能性を示している農業機械として,自動運転型の草刈り機が挙げられる.一般に田植機に代表される農業機械は季節性があり,田植機は田植えのシーズンにしか活用されず,コンバインは刈り取りのシーズンにしか活用されない.自動化においては,機器の稼働率は重要であり,通年で活用される機器を自動化することは非常に投資効果が大きい.すなわち,圃場の管理業務に自動化を適用することがより適していると言える.その一つは雑草管理であり,草刈り作業の自動化は,どの作物においても必要な作業であり,ニーズが高いと言える.各社,草刈りロボットに近い草刈り機は販売されつつあるが,まだ,遠隔操作型にとどまっている.特に草刈り機においては,刈刃といった危険な部位があることで,安全機器等の技術やガイドラインが十分でないことから,安易に自律型移動機器として販売することは,企業側からすると安全上のリスクが高いとされる.
農業において,近年ドローンの活用が進んでいる.従来リモートセンシング技術として衛星画像による大まかな圃場管理は活用されてきていたが,ドローンを活用することで,個人レベルで低層からのリモートセンシング技術を活用することが進められている.第8回ロボット大賞農林水産大臣賞を受賞した完全自動飛行のドローンによる「空からの精密農業」(株式会社ナイルワークス)においては,トラクター等と同様な自動運転技術と,高精度に正確に農薬を自動散布する技術と併せて,画像処理により,生育の自動診断技術を活用している.稲体の各部位(葉身,葉鞘,茎,穂,籾)の赤色光と近赤外の反射率から,各部位ごとの光合成速度を推測し,窒素吸収量を推定する技術であり,ゆくゆくは一株単位の予測までの精度向上が図られている.
その他,このように自動化が進むと,自動化された機器からデータを集めることで,全体の収量予測や需給マッチングによる生産調整等に活用することが可能となる.まさしく農業の6次産業化が加速されていくものと期待される.農業のデータをオープンデータとして,利活用する仕組みとして,WAGRIと称する農業データ連携基盤が整備されている(3).農業データ連携基盤は,内閣府・戦略的イノベーション創造プログラム(SIP)「次世代農林水産業創造技術」で開発したものであり,気象,農地,地図,生育予測,土壌,統計等の農業に関係するデータを提供し,農業従事者のデータに基づく科学的農業の支援を行っている.特に,ロボットは単なる農作業の自動化というスタンドアローンな自動化ロボットシステムから,クラウドにつながることで,そこから得られるデータを利活用するそのデータ取得のエッジデバイスとして活用されていくことになり,Society5.0の一つとなる新たな農業分野における社会システムの一部として機能することが求められる.
〔谷川 民生 (国研)農業・食品産業技術総合研究機構〕
参考文献
(1)スマート農業:ロボット技術やICTを活用して超省力・高品質生産を実現する新たな農業を実現,農林水産省, https://www.maff.go.jp/j/kanbo/smart/ (参照日2021年4月12日)
(2)第8回ロボット大賞農林水産大臣賞完全自動飛行のドローンによる「空からの精密農業」, https://www.robotaward.jp/archive/2018/8th%20Robot-GBsingle05.pdf(参照日2021年4月12日)
(3)農業データ連携基盤協議会(WAGRI協議会), https://wagri.net/ja-jp/(参照日2021年4月12日)