特集 World Robot Summit 2025 過酷環境F-REIチャレンジ
WRS2025過酷環境F-REI チャレンジの報告
はじめに:過酷環境F-REIチャレンジの目的と意義
World Robot Summit(WRS)は、ロボットの社会実装と研究開発の促進を目的とした国際的なロボットイベントである。2025年大会では、7月に大阪でのイベントが実施され、12月には愛知での開催が予定されている。WRS2025過酷環境F-REIチャレンジは、福島ロボットテストフィールドを舞台に、2025年10月10日から12日までの3日間にわたって開催された。本競技会は、大規模災害時の過酷環境下において、ロボットおよびドローン技術がいかに有効に機能しうるかを実証し、技術の発展を加速させることを主目的としている。
東日本大震災以降、日本は災害対応技術の重要性を痛感してきた。特に、人間が立ち入ることが困難な過酷環境下での情報収集や作業遂行は、ロボット技術に期待される重要な役割である。本競技会は、そうした社会的要請に応える技術革新の場として位置づけられている。さらに、こうした人が立ち入れないような過酷環境で作業するロボティクスの性能評価と標準化を目指している。
本競技会の特徴は、4つの異なる競技を通じて多角的に技術を評価する点にある。過酷環境ドローンチャレンジ、プラント災害チャレンジ、シミュレーション災害チャレンジ、そして標準性能評価ドローンチャレンジ(STM:Standard Test Method)という4つの競技は、それぞれ異なる視点から災害対応ロボット技術の実用性を検証している。
これらの競技を通じて、参加チームは実際の災害現場を想定した困難な課題に挑戦し、技術の限界を押し広げることが求められた。本報告書では、各競技の詳細な内容と成果、そして今後の技術開発の方向性について述べる。
大会概要と運営体制
WRS2025過酷環境F-REIチャレンジは、福島国際研究教育機構(F-REI)が主催し、経済産業省が共催する形で実施された。会場となった福島ロボットテストフィールドは、世界最先端のロボット研究開発拠点として整備された施設であり、浪江滑走路とともに大規模な実証実験を可能にする理想的な環境を提供している。図1はWRS2025過酷環境F-REIチャレンジの開会式の様子を示している。






図1 WRS2025過酷環境F-REIチャレンジ開会式
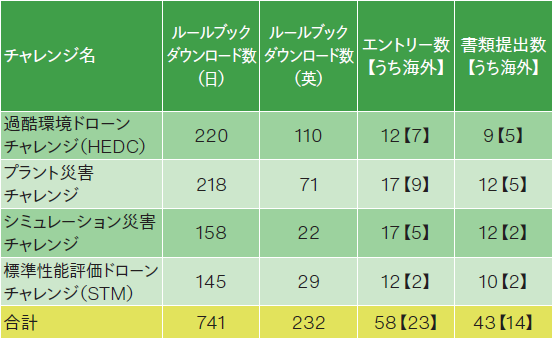
本大会には、国内外から多くのチームが参加し、最先端のロボット・ドローン技術を競い合った。参加チームは、大学研究機関、民間企業、そして産学連携チームなど多岐にわたり、それぞれが独自の技術アプローチで課題に取り組んだ。表1は4競技に関する国内外からのルールブックダウンロード数、エントリー数、書類提出数を示す。
表1 国内外からのエントリー数および書類提出数
審査基準は、競技ごとに明確に設定された。過酷環境ドローンチャレンジでは、ミッション達成度、所要時間、安全性、そして法令遵守が重視された。プラント災害チャレンジとシミュレーション災害チャレンジでは、異常検知の正確性、作業の迅速性、環境適応性が評価基準となった。標準性能評価チャレンジでは、操縦性、器用性、マッピング能力、自律性という4つの基礎性能が客観的に測定された。また、本大会を含むWRS全体(大阪・福島・愛知)の賞金総額は5,000万円が設定されており、優秀な技術開発を強力にインセンティブ化している。
競技構成の全体像
WRS2025過酷環境F-REIチャレンジは、災害対応ロボット技術を多面的に評価するため、4つの独立した競技で構成されている。それぞれの競技は、異なる技術要素に焦点を当てながらも、「過酷環境下での実用性」という共通のテーマで結ばれている。
過酷環境ドローンチャレンジ(HEDC)
災害時の空中からの情報収集、救援ルート探索、要救助者特定、地面に書かれた文字判読と物資搬送、建屋内調査という実際の救援活動を想定した総合的なミッションを遂行する。ドローンの飛行性能だけでなく、センサー技術、画像解析能力、無線通信技術、自律飛行能力、そして操縦者の判断力が総合的に評価される。
プラント災害チャレンジ
化学プラントや工場施設における異常検知と緊急対応を模擬した競技である。デジタルツイン技術を活用し、リアルタイムでプラント状態を監視しながら、ロボットによる点検、異常検知、診断、事故対応を行う。狭隘空間での作業能力や、煙・蒸気などの視界障害下での操作性が試される。
シミュレーション災害チャレンジ
実際のプラント災害を模擬した過酷環境下で、情報収集から緊急対応までの一連の作業を遂行する。7段階のセッションを通じて環境条件が変化し、ロボットの適応力が試される。レバー操作、バルブ操作、消火活動、ダクト内航行、タンク内部調査など、多様なタスクが課される。
標準性能評価ドローンチャレンジ(STM)
ドローンの基礎性能を客観的に測定し、標準化を推進する競技である。操縦性、器用性、マッピング能力、自律性の4つの基礎性能を、4つの異なるフィールドで評価する。狭隘空間、風、煙、雨、電波障害などの過酷環境要素が導入され、実用的な性能評価が行われる。
これら4つの競技は、それぞれ独立しながらも相互に補完し合う関係にある。過酷環境ドローンチャレンジが総合的な実践力を問うのに対し、標準性能評価ドローンチャレンジは基礎性能の客観的測定に焦点を当てている。プラント災害チャレンジとシミュレーション災害チャレンジは、特定の産業分野における実用性を検証する。
このような多層的な競技構成により、参加チームは自らの技術の強みと弱みを正確に把握し、今後の研究開発の方向性を明確にすることができる。また、異なる競技間での技術交流も活発に行われ、イノベーションの創出につながっている。
過酷環境ドローンチャレンジ(HEDC)の詳細
過酷環境ドローンチャレンジ(HEDC)は、本大会の中核をなす競技であり、実際の災害救援活動を想定した最も総合的なミッションを課している。参加チームは、3つの主要ミッションを遂行し、その達成度、所要時間、安全性が評価される。図2はHEDCの競技概要を示している。
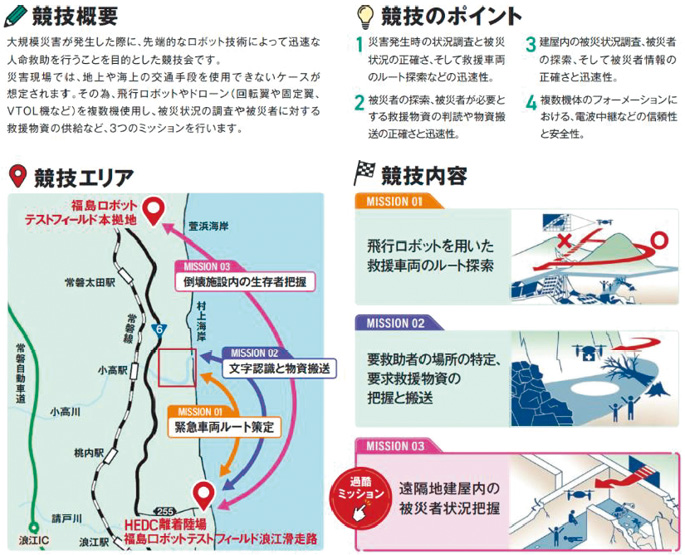
図2 過酷環境ドローンチャレンジ(HEDC)競技概要
ミッション1:救援車両ルート探索
災害発生直後の混乱した状況下で、救援車両が現場に到達するための最適ルートを空中から調査し策定する。道路上の障害物を特定し、通行可能なルートをいかに速く探索するかが重要である。この場合、提出物はオルソ画像の電子媒体である。
ミッション2:要救助者特定と救援物資搬送
被災地域内の要救助者を空中から探索し、その位置を正確に特定する。さらに、孤立した要救助者に対して、地面に書かれている文字を判別して、要救助者が求めている救援物資(水、食料、医薬品など)を搬送する。人命救助における時間的制約の中で、迅速かつ正確な判断と行動が要求される。
ミッション3:遠隔地建屋内被災者状況把握と3Dマップ作成
倒壊の危険がある建物内部に侵入し、被災者の状況を把握するとともに、建物内部の3Dマップを作成する。GPS信号が届かない屋内環境での自律飛行、障害物回避、そして高精度な3Dマッピング技術が試される。なお、ダミー人形が室内に放置され、どのような姿勢か、ネームタグの名前を読み取ることが求められる。
技術的要求事項
・航空法および関連法規の厳格な遵守
・安全飛行管理システムの実装
・過酷環境でも途絶しないロバストな通信能力
・リアルタイム映像伝送と画像解析
・高精度自律飛行能力と障害物回避
・GPS非依存型の屋内航法システム
・高精度3Dマッピング技術
・物資搬送能力と高精度物資リリース技術
・風雨など悪天候・低照度条件下での飛行能力
図3はHEDCの競技結果(上位3チーム)を、図4は浪江滑走路のパドックと離陸風景、図5は同じくGCS地上局管制センターを示している。
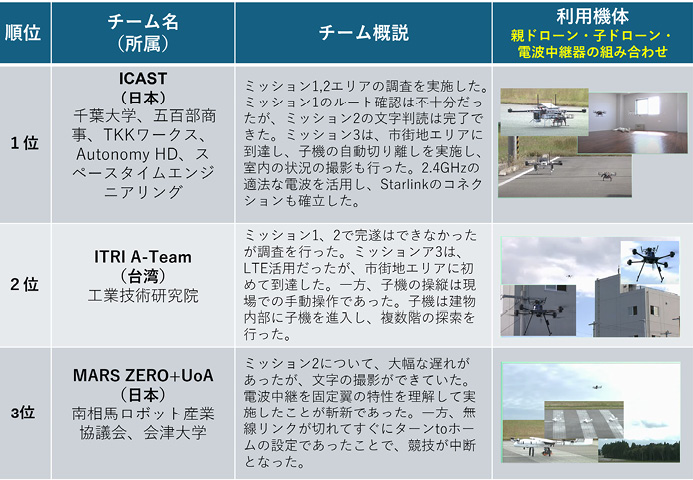
図3 HEDCの競技結果(上位3チーム)




図4 浪江滑走路のパドックと離陸風景




図5 浪江滑走路のパドックとGCS地上局管制センター
HEDCの競技結果と技術的成果
過酷環境ドローンチャレンジには、国内外から9チームが参加予定であったが、電波法や技術基準適合証明(技適)などの関係で最終的に競技を実施したチームは5チーム(国内3チーム、海外2チーム)であった。なお、5チームはミッション攻略に全く異なったアプローチで臨み、技術レベルにも大きな差が見られた。大会2日目が大雨という悪天候に見舞われたが、参加チームの技術水準は2024年のプレ大会より向上しており、今大会では特に自律飛行能力と無線通信技術、および、FPV技術において顕著な進歩が見られた。なお、FPVとはFirst Person Viewの略で、機体搭載カメラの映像を見ながら遠隔操縦する飛行方法をいう。
救援ルート探索、文字判別に関する成果
ミッション1の救援ルート探索では、ほぼすべてのチームが不完全ながら障害物を特定し、適切なルート探索に成功した。ミッション2では優勝チームは、AIを活用した画像解析により、地面に配置されたレンガなどを自動的に識別し、文字の書かれている場所の特定を行った。また、複数のドローンを協調運用するチームも見られ、広範囲を短時間でカバーする効率性が実証された。これは、大規模災害時の初動対応において極めて重要な能力である。
図6は浪江滑走路のパドックの様子、および、ミッション2のレンガで地表に書かれていた文字を判別した画像、そして、浪江滑走路から13㎞離れた福島ロボットテストフィールド(RTF)のミッション3エリアに到達したドローンの様子を示している。

図6 浪江滑走路パドック、文字判別、および、ミッション3エリアに到着したドローン
建屋内調査の技術的突破
ミッション3の建屋内調査では、FPVオペレータ依存型遠隔操縦飛行が大きく進歩した。優勝チームは、ステレオカメラ型ビジュアルSLAM(位置推定とマッピングの同時実行)システムを採用し、複雑な屋内環境でも安定した飛行と高精度な3Dマップ作成を試みたが、3Dマップは実現できなかった。
ちなみに、HEDC優勝のICASTチームのミッション3のチャレンジ方法を示す。子機を携えた大型ドローンが浪江から2.4GHz、出力1Wでテレメトリと画像伝送を行いながら、RTFのミッション3エリアまで到達。建物の傍に着陸すると、自動で子機を切り離す。親機にスターリンクミニの受信機が搭載されており、衛星回線を使って、子機の制御を浪江滑走路からFPVで操縦した。子機搭載カメラの映像が13㎞離れた浪江滑走路まで衛星回線経由で伝送され、その映像をもとに浪江滑走路から子機を操縦し、窓から侵入して要救助者を発見した。
図7は親機から子機を切り離して、親機は子機が離陸できるように距離を置いている。図8は13㎞遠隔の浪江滑走路GCS地上局管制センターから、スターリンクミニの映像を見ながら、FPV操縦により子機ドローンを操縦して窓から室内に侵入する瞬間の様子を示している。これは感動的瞬間であった。図9は建物内の要救助者を捜索している様子である。これも子機カメラ映像をスターリンク衛星を介してGCS地上局に届け、その映像を見ながらFPV操縦コマンドを送信、スターリンク衛星を介しての子機の操縦となる。

図7 ミッション3エリアに到着し子機を切り離した親機

図8 子機ドローンが窓から室内に侵入する瞬間

図9 FPV飛行により建物内に侵入して要救助者を探索している子機
プラント災害チャレンジの詳細
プラント災害チャレンジは、化学プラントや工場施設における事故対応を想定した競技である。デジタルツイン技術を活用し、仮想空間と実空間を連携させながら、ロボットによる点検、異常検知、診断、そして緊急対応を行う。
本競技は、産業インフラの安全管理における最先端技術の実証の場となっている。
図10はプラント災害チャレンジの競技概要を、図11はプラント災害チャレンジの競技結果(上位3チーム)を示す。図10に示されているようにミッションはP1からP6まで6つの競技内容がある。なお、プラント災害チャレンジでは予選と決勝戦が行われ、予選は以下のミッションP1~P5を、決勝戦はミッションP6を実施した。

図10 プラント災害チャレンジの競技概要
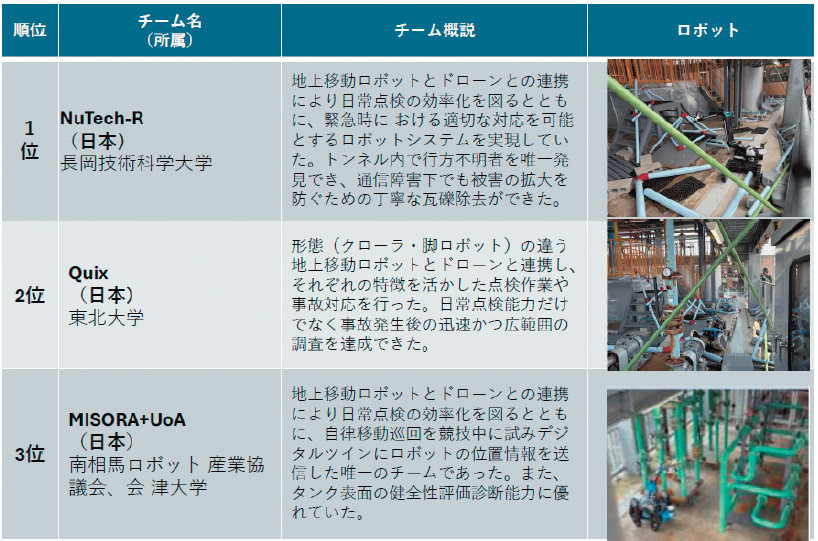
図11 プラント災害チャレンジの競技結果(上位3チーム)
ミッションP1:調査点検と設備調整
デジタルツインから提示される作業指示に従い点検を行う。圧力計などのメータの数値を自動的に読み取り、デジタルツインに報告する。指示された状態になるようバルブの開閉を行う。
ミッションP2:異常検知
プラント設備の点検中、異常を検知し、迅速に報告する。その後、デジタルツインからの指示に従い速やかに対応し、事故を未然に防ぐ。
ミッションP3:異常診断
大型タンク壁面に対して老朽化/経年劣化を要因とする変状(クラックや減肉など)の発見を行う。指定された箇所の検査結果をデジタルツインに報告する。
ミッションP4:瓦礫撤去・バルブ操作
ボイラの爆発事故が発生、事故対応のためデジタルツインからの指令により、被災状況調査および散乱した瓦礫を指示された場所へ撤去する。また、ガス漏れの危険性があるため、デジタルツインから指示されたバルブの閉栓を行い、作業内容をデジタルツインに報告する。
ミッションP5:トンネル災害対応
トンネル内で多重事故が発生、点検ロボットが出動する。トンネル内の事故車両内探査をするとともに、要救助者の人数と場所の報告を行う。
ミッションP6:事故対応
デジタルツインから提示される点検作業指示に従い、調査・点検を行っている最中に、稼働状態の異常もしくは事故が発生する。事故発生後のプラント内被災状況を迅速に収集し、デジタルツインに報告するとともに、デジタルツインから指示された作業を行い緊急対応を実施する。
図12と図13はプラント災害チャレンジの本戦風景を示している。図14はプラント災害チャレンジの中のトンネル災害に関する本戦風景を示している。
なお、審査委員会からの資料によると、1位と2位にはダブルスコアの差があり、1位は圧倒的な勝利であった。

図12 プラント災害チャレンジの本戦風景
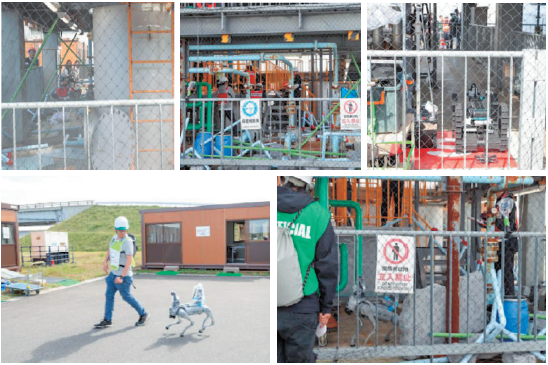
図13 プラント災害チャレンジの本戦風景
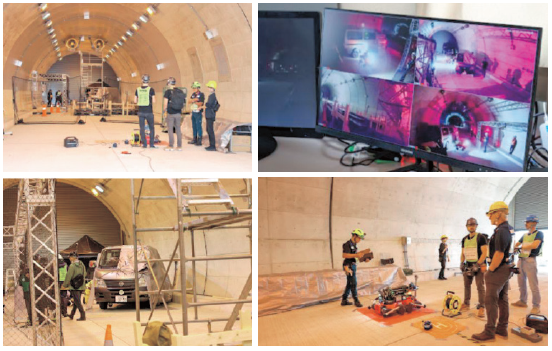
図14 プラント災害チャレンジ(トンネル災害)の本戦風景
デジタルツイン技術の活用
本競技の最大の特徴は、デジタルツイン技術を全面的に活用している点である。プラント設備の詳細な3Dモデルが仮想空間に構築されており、センサーデータがリアルタイムで反映される。残念ながらMISORA+UoAチームのみが、デジタルツイン上でロボットの位置情報を送付したチームであった。しかし、MISORA+UoAチームもデジタルツインの技術をフルに活用はできる状態にはなかった。
1位のNuTech-Rチームは地上移動ロボットとドローンの連携により日常点検の効率化を図るとともに、緊急時の適切な対応可能なロボットシステムを実現、行方不明者を唯一発見して、通信障害の中で瓦礫除去を行った。2位のQuixチームもグラウンドロボットとドローンを連携させた。
なお、1位と2位、および、3位の得点差には大きな隔たりがなく僅差であった。
プラント災害チャレンジの成果と課題
プラント災害チャレンジには10チームが参加し、産業現場での実用性を強く意識した技術開発の成果が示された。特に、異常検知の迅速性と正確性においてプレ大会からの顕著な進歩が見られ、実際の産業応用への道筋が明確になってきた。ただ、デジタルツインの活用に関しては大きな課題を残した。
異常検知技術の進展と課題
異常検知ミッションでは、チームによってはAIベースの異常検知システムを試行的に実装しており、従来の閾値ベースの手法を上回る性能を示す試みがなされた。ただ、課題も多く機械学習モデルの不十分さが露呈している様子であった。
プラント点検は、複数のセンサーデータを統合して解析するマルチモーダル異常検知システムが有効とされており、温度、圧力、振動、音響などの情報を総合的に評価することで、誤検知を最小限に抑えながら高い検知率を達成することが求められる。こうした技術は、実際のプラント運転において、事故の予兆を早期に捉える能力を持っているが、本大会では本格的な導入には至っていない。
シミュレーション災害チャレンジの詳細
シミュレーション災害チャレンジは、実際のプラント災害を模擬した最も過酷な環境下で、ロボットの総合的な能力を試す競技である。7段階のセッションを通じて環境条件が段階的に悪化し、ロボットの適応力と耐久性が徹底的に評価される。本競技は、災害対応ロボットの実用性を最も厳格に検証する場となっている。
本チャレンジ参加者は、運営側が用意した、実機のスペックを反映した4台のプラットフォームロボット(双腕パワーシャベル、4脚ロボット、フリッパー付きのクローラロボット、ドローン)のハードウエアに応じて、自律制御アルゴリズムや遠隔操作インタフェースなどのソフトウエアを開発する。競技では、与えられたミッションの遂行を目指し、ロボットを操作し、その達成度を競う。また、プラットフォームロボットを決められた制約のなかで改造することも許されている。
競技は4つのエリアで行い、それぞれのエリアに下記に述べる7つのセッションのタスクがあり、状況が少しずつ変化していく。
セッション1: 通常環境
基本的な作業環境での性能評価。レバー操作、バルブ操作などの基礎的タスクを実施し、ベースライン性能を測定する。
セッション2: 照明低下
照明が段階的に低下し、視認性が悪化する環境。カメラの露光調整やライトの使用が必要となる。
セッション3: 煙の発生
視界を遮る煙が充満し、光学カメラでの視認が困難になる。代替センサーの活用が求められる。
セッション4: 通信障害
無線通信が断続的に遮断され、ロボットの自律性が試される。通信回復後の迅速な復帰能力も評価される。
セッション5: 狭隘ダクト航行
直径30cmのダクト内を移動し、内部の状態を調査する。狭小空間でのロボット操作技術が評価される。
セッション6: タンク内部調査
煙が充満したタンク内部に侵入し、被害状況を把握する。GPS非依存の航法システムが必須となる。
セッション7: 総合緊急対応
すべての過酷環境要素が複合的に発生する中で、消火、バルブ遮断、避難経路確保などの緊急対応を実施する。
消火活動は、火災の拡大を防ぐための重要なタスクである。ロボットは、火源を特定し、適切な消火剤を使用して鎮火する。高温環境下での作業となるため、ロボットの耐熱性が試される。
ダクト内航行は、通常は人間が立ち入れない空間での作業能力を評価する。狭小かつ複雑な経路を、接触せずに移動する高度な操縦技術が要求される。
多様なタスクの設定
本競技では、実際の災害対応で必要となる多様なタスクが課される。レバー操作とバルブ操作は、プラント設備の制御における基本的な作業である。緊急時には、これらを迅速かつ正確に実施する能力が人命を左右する。
図15はシミュレーション災害チャレンジの競技概要を、図16はシミュレーション災害チャレンジの競技結果を示す。図17と図18はシミュレーション災害チャレンジの本戦風景を示す。
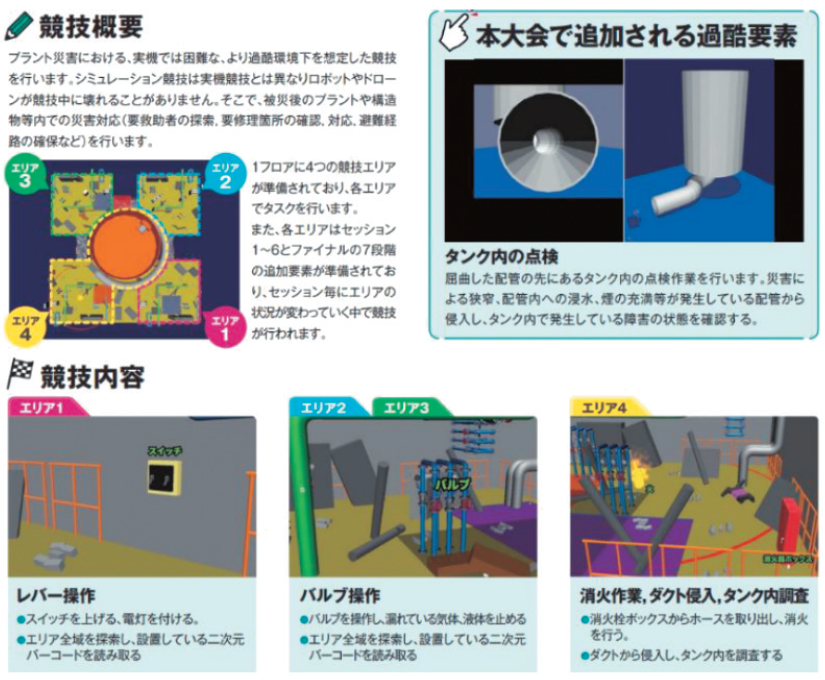
図15 シミュレーション災害チャレンジの競技概要

図16 シミュレーション災害チャレンジの競技結果(上位3チーム)

図17 シミュレーション災害チャレンジの本戦風景

図18 シミュレーション災害チャレンジの本戦風景
シミュレーション災害チャレンジの競技結果
シミュレーション災害チャレンジには10チームが参加し、極めて困難な条件下での技術実証が行われた。段階的に悪化する環境条件の中で、ロボットの適応力と作業精度が厳しく評価された。すべてのセッションを完遂できたチームはなく、本競技の難易度の高さを物語っている。
各セッションでのロボット性能評価
初期セッションでは、すべてのチームが高い作業精度を示した。レバー操作やバルブ操作などの基礎的タスクは、ロボティクス技術の進歩により、十分に実用的なレベルに達している。操作時間も年々短縮されており、効率性の向上が確認された。
照明が低下したセッション2でも、多くのチームが適切に対応した。カメラの自動露光調整、補助照明の使用、あるいは赤外線カメラへの切り替えなど、各チームが独自の対策を実施した。
煙と狭隘空間での成功事例
セッション3の煙充満環境では、光学カメラだけに依存するチームは大きな困難に直面した。一方、LiDARや赤外線センサーを併用するチームは、比較的スムーズに作業を継続できた。1位のNITRo-UIは双腕マニピュレータを備えたクローラ型UGVと小型UAVを併用して、複雑作業と迅速作業を実現した。また、ゲームパッドで操作できる汎用的なユーザーインターフェースを開発した。
シミュレーション災害チャレンジの得点結果は、1位と2位にダブルスコアの差があり、2位と3位の間にはダブルスコアまではいかないが大きな得点の開きがあった。
標準性能評価ドローンチャレンジ(STM)の詳細
標準性能評価ドローンチャレンジ(STM)は、ドローンの基礎性能を客観的に測定し、標準化を推進することを目的とした競技である。操縦性、器用性、マッピング能力、自律性という4つの基礎性能を、4つの異なるフィールドで評価する。
4つのフィールドとは、狭隘空間水平スラローム、狭隘空間垂直スラローム、トラスフィールド、複合型シークレットフィールドである。
本競技は、ドローン技術の発展を支える基盤的な評価手法の確立を目指している
図19は標準性能評価ドローンチャレンジ(STM)の競技概要を、図20は標準性能評価ドローンチャレンジ(STM)の本戦の様子を示し、図21は標準性能評価ドローンチャレンジ(STM)競技結果(上位3チーム)を示している。
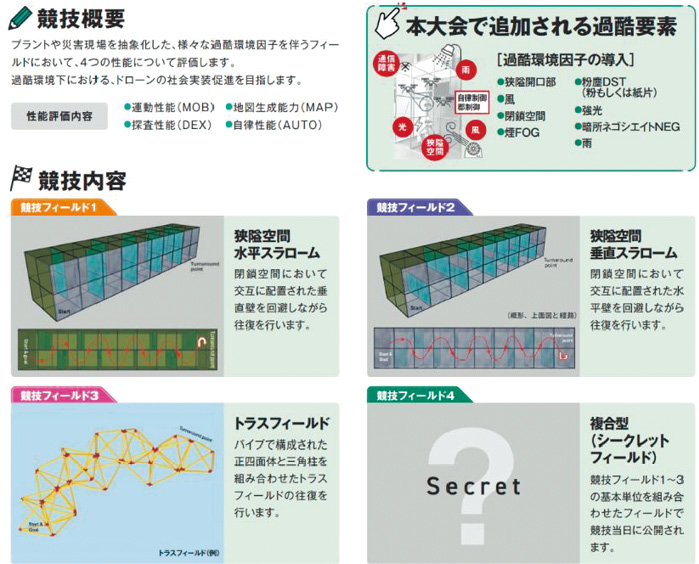
図19 標準性能評価ドローンチャレンジ(STM)の競技概要

図20 性能評価ドローンチャレンジ(STM)の本戦風景

図21 性能評価ドローンチャレンジ(STM)の競技結果(上位3チーム)
性能評価内容は、運動性能(MOB)、地図生成能力(MAP)、探査性能(DEX)、自律性能(AUTO)の4つの観点から評価される。
MOBは、競技フィールドの往復回数で評価する。DEXは、バケツ底部やランドルト環の視認、サンプル回収などのタスクの達成度で評価する。MAPは、競技フィールドの地図作成精度、探査対象位置推定精度と意味理解、さらに、これらの情報の地図への埋め込み性能で評価する。
各フィールドでは、狭隘かつ閉鎖空間という空間的制約および非GPSという過酷因子、さらには通信の遅延・遮断に対応しなければならない。また、ドローンには大型扇風機による風外乱に対するロバスト性能や暗所での飛行性能などが要求される。図22と図23は標準性能評価ドローンチャレンジ(STM)の競技風景を示している。

図22 標準性能評価ドローンチャレンジ(STM)の本戦風景
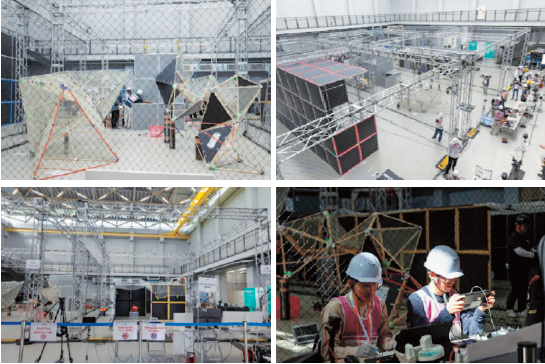
図23 標準性能評価ドローン(STM)チャレンジ競技風景
4つの競技フィールドの詳細
水平スラロームフィールドは、地上1.5mの高度に設置された複数のゲートで構成される。ゲートの幅は徐々に狭くなり、最も狭いゲートは1.2m幅である。ドローンは、これらのゲートを順番に通過し、所要時間と正確性が評価される。このフィールドは、基本的な操縦技術を評価するための標準的な課題として設計されている。
垂直スラロームフィールドは、高度0.5mから4mまでの範囲に配置されたゲートで構成される。ドローンは、急激な高度変化を伴いながらゲートを通過する必要があり、三次元的な操縦能力が試される。
トラスフィールドは、複雑な鉄骨構造物で構成されており、マッピング能力を評価する。ドローンは、この構造物を多角的にスキャンし、詳細な3Dモデルを作成する。マップの完全性、精度、そして情報の埋め込み能力が評価される。
STMチャレンジの成果と技術的インパクト
標準性能評価ドローンチャレンジには最終的に9チームが参加し、ドローン技術の基礎性能を客観的に測定する貴重なデータが収集された。参加チームの技術レベルは極めて高く、特に操縦性と自律性において顕著な進歩が確認された。本競技により、ドローン技術の標準化に向けた重要な知見が得られた。
1位のTeam Sogakkanチームはドローンを積極的に改造して元の性能を大幅に改善することで、多くのタスクを達成。画像処理による自動読み取りや地図生成も実現し、自律化への努力が評価された。2位のNITRoDroneチームもドローンの改造により難易度の高いシークレットフィールドにおける多くのタスクを達成した。3位のポーランドチームRaptors PLは、超小型ドローンの画像処理や地図自動生成など高い技術力を示した。得点は1位が2位、3位を引き離しているが、2位と3位は僅差であった。
ドローンを用いた消防隊員によるトンネル災害対応デモンストレーション
大会最終日には、大阪府豊中市消防局によるトンネル災害フィールドでの、ドローンを用いた想定訓練(デモンストレーション)が実施された。大規模地震が発生し、トンネルの天井が崩落し、車両が取り残されている想定で、3名の現職の消防隊員(リーダ1名、オペレータ1名、サブオペレータ1名)によるドローン1機を用いたデモンストレーションが実施された。トンネル内の被害状況の把握、発火の可能性がある危険物の有無、車両内の要救助者の有無などの情報を収集し、災対本部に情報が報告された。レスキュー隊へ情報を提供し、レスキュー隊到着までドローンによる現場の監視を継続するミッションを完了した。実災害さながらの緊張感があり、迫力のあるデモンストレーションで、見学者はドローンの災害対応での重要性を改めて認識していた。図24にトンネル災害フィールドでの大阪府豊中市消防局によるドローンを用いた想定訓練(デモンストレーション)の様子を示す。

図24 トンネル災害フィールドでのデモンストレーション
(大阪府豊中市消防局)
競技全体を通じた技術革新のハイライト
WRS2025過酷環境F-REIチャレンジを通じて、災害対応ロボット技術における複数の重要な技術革新が実証された。これらの革新は、個別の競技の枠を超えて、災害対応技術全体の発展に大きく貢献するものである。ここでは、大会全体を通じて確認された主要な技術的成果を総括する。図25は輿水復興副大臣(当時)の会場見学を示している。

図25 輿水恵一復興副大臣(当時)のF-REIチャレンジ会場見学
自律飛行・自律作業技術の飛躍的進展
2024年のプレ大会と本大会を比較した場合に、最も顕著な進歩は、自律飛行および自律作業技術の進化があげられる。GPS非依存型のSLAM技術が実用レベルに達し、屋内や地下など従来は困難とされた環境でも安定した自律飛行が可能となった。機械学習ベースの障害物認識と経路計画により、複雑な環境下でも人間の介入を最小限に抑えた作業が実現されるようになっている。
デジタルツイン連携技術の実用化
デジタルツイン技術とロボット制御の統合が少し進展した。仮想空間と実空間のリアルタイム連携により、遠隔操作者は多角的な情報に基づいて的確な判断が以前と比較して、やや良くなってきた。センサーデータの可視化、異常予測、最適な対応策の提案など、デジタルツインが提供する付加価値は極めて大きいが、本大会ではその有効性は検証できていない。
通信技術の革新と冗長性の確保
過酷環境下での通信技術も大きく進歩した。スターリンクミニなどの衛星通信を積極的に活用して、通信プロトコルの最適化、通信断絶時の自律行動など、通信の信頼性を高める多様な技術のトライアルが検証された。また、複数の通信手段を併用する冗長性の確保も重要なアプローチとして確立されつつある。
3Dマッピングと情報共有の高度化
高精度な3Dマッピング技術と、それを活用した情報共有システムの発展も注目に値する。リアルタイムでの3Dマップ作成、複数のロボットによる協調マッピング、マップへの多様な情報の埋め込みなど、単なる形状記録を超えた価値を持つマッピング技術が実現されつつある。
技術統合による相乗効果
これらの個別技術の進歩に加えて、複数の技術を統合することで生まれる相乗効果も重要である。例えば、自律飛行技術と高精度マッピング技術を組み合わせることで、人間が立ち入れない危険な場所の詳細な調査が可能となる。デジタルツインとAI異常検知を統合することで、予防保全の精度が飛躍的に向上する。
また、複数のロボットを協調運用する技術も進展している。異なる能力を持つロボットが連携することで、単一のロボットでは困難なミッションも遂行可能となる。例えば、空中ドローンが広域を調査し、地上ロボットが詳細な作業を実施するといった役割分担が効果的である。
参加チームの多様性と産学連携・国際連携、および、表彰式・閉会式
WRS2025過酷環境F-REIチャレンジには、国内外から多様なバックグラウンドを持つチームが参加し、技術交流と協力の場となった。大学研究機関、民間企業、スタートアップ、そして産学連携チームなど、さまざまな形態のチームが集結し、それぞれの強みを活かした技術開発の成果を披露した。同時に国内外から過酷環境F-REIチャレンジに多くの関心のある方々に参加いただいた。
HEDC参加チーム
HEDCに関しては表2に示すように、9チームがエントリーしたが、実際に競技に参加したチームは5チームであった。特に、大きな障壁は電波法であり、日本と海外では周波数帯と出力において大きな差異があり、総務省との交渉は行ったが、今後の大きな課題を残した。台湾、エクアドル、インド、シンガポールいずれも日本では認証されていない5.8GHz帯が一般的であった。本大会では海外チーム用にLTE回線を用意したが、来日後の作業となり、海外チーム、ならびに海外チームに協力した国内チームに大変な作業をお願いしたことは事実である。結果的に海外チームには技術的、精神的な大きなハンディキャップとなった。それでも台湾ITRI A-Teamは2位と健闘しており、敬意を表したい。無線機器の使用方法などに端を発して、国際交流が深まり大会終了時のFarewell Partyでは、強い友情が生まれていた。
表2 過酷環境ドローンチャレンジ(HEDC)参加チーム

以下、プラント災害チャレンジ、シミュレーション災害チャレンジ、標準性能評価ドローンチャレンジ(STM)の参加チームについて、表3~表5に紹介する。
表3 プラント災害チャレンジ参加チーム
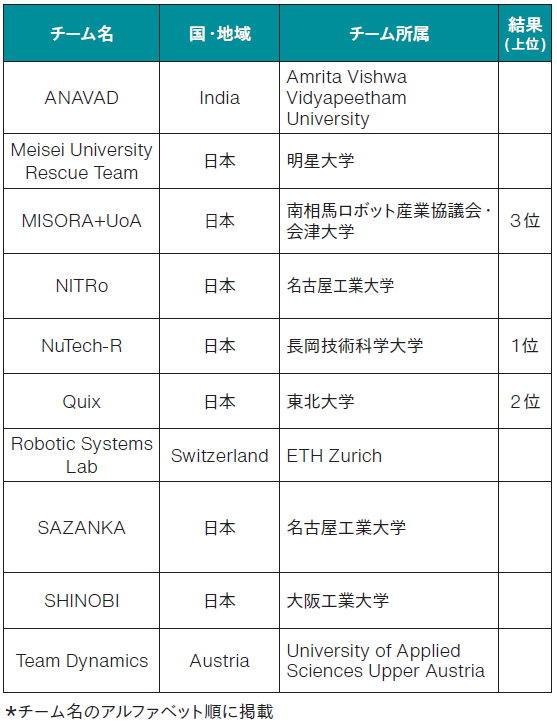
表4 シミュレーション災害チャレンジ参加チーム
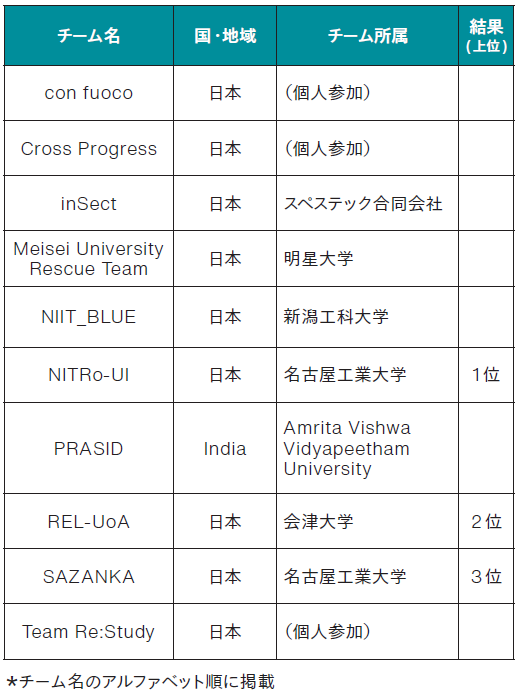
表5 標準性能評価ドローンチャレンジ(STM)参加チーム

図26、図27は福島ロボットテストフィールド内のプラント災害チャレンジなどに関する視察ツアーを示している。また、図28は過酷環境ドローンチャレンジ(HEDC)とプラント・シミュレーション・標準性能評価(STM)各チャレンジについて2名の競技委員長から詳細な説明を行った写真である。

図26 福島RTF内F-REIチャレン会場視察ツアー

図27 福島RTF内F-REIチャレン会場視察ツアー

図28 過酷環境ドローンチャレンジ(HEDC)とプラント・シミュレーション・標準性能評価(STM)各チャレンジの詳細な説明
図29は航空局と米国防総省の見学の様子、図30は表彰式で、1位は経済産業大臣賞、2位は福島県知事賞、3位はWRS実行委員長賞となっており、別途賞金が贈られることになっている。図31は4競技優勝者の喜びの声、競技委員長の総括とF-REI江村理事の閉会の挨拶である。(その他スナップ写真図32~図34)

図29 航空局および米国防総省からの見学者

図30 4つのチャレンジの表彰式、
1番上の段:プラント災害チャレンジ(左から1、2、3位)
2番目の段:シミュレーション災害チャレンジ(左から1、2、3位)
3番目の段:標準性能評価(STM)ドローンチャレンジ(左から1、2、3位)
4番目の段:過酷環境ドローンチャレンジ(HEDC)(左から1、2、3位)

図31 4競技優勝者の喜びの声、競技委員長の総括、F-REI江村理事閉会の挨拶

図32 表彰式・閉会式後の各チームのスナップ写真

図33 併設された子どもたち用のドローン飛行イベント

図34 閉会式後のHEDC・Farewell Partyでの海外チーム(台湾ITRI A-チーム&エクアドルCIDFAEチーム合同写真)
図35は野波競技委員長、東野審査委員長、戸澤安全管理委員長、HEDC競技1位チームリーダーの鈴木智先生、2位チームリーダーのDr. Wen-Yang Peng、3位チームリーダー金田社長の写真を示す。図36・37は翌日に丸屋グランデで開催されたIRS技術交流会の様子で、図38は10月13日午後開催された、ETH Zurichの4足歩行ロボットANYmalチームによるHEDCミッション3のエキシビションイベントを示している。

図35 閉会式後のHEDC・Farewell Partyでの挨拶(競技委員長、審査委員長、安全管理委員長、1位チームリーダー、2位チームリーダー、3位チームリーダー)

図36 10月13日丸屋グランデでのIRS技術交流会

図37 IRS技術交流会全体集合写真
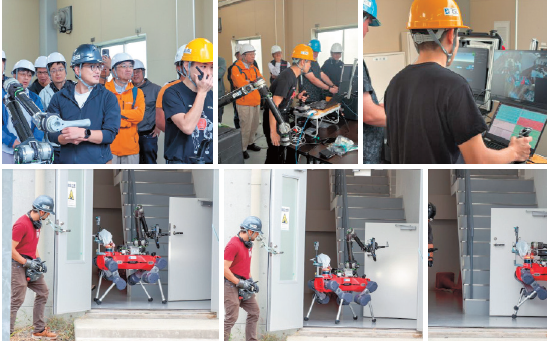
図38 ETH Zurich 4足歩行ロボットANYmalチームのHEDCミッション3のデモンストレーション
産学官連携による技術開発の促進
本大会の大きな特徴は、産学官連携による技術開発が活発に行われている点である。主に大学が開発した先端的なハードやアルゴリズムを企業が実装し、実用的なシステムとして完成させる。政府機関は、こうした実証の場を提供するとともに、社会実装に向けた制度設計を支援する。理想的には、このような三者の協力関係が、技術の迅速な発展と実用化を促進していくものと考えられる。
この観点から、特に注目されたのは、HEDCでプレ大会から大きく技術的に躍進をしていると思われるのが、HEDCで優勝したICASTチームである。大学、大手通信会社とドローン・スタートアップの共同チームである。ICASTチームは、千葉大学、五百部商事、TKKワークス、Autonomy HD、スペースタイムエンジニアリングの5者の連携チームになっている。建屋内に侵入した小型機体は千葉大学鈴木研究室のオリジナルで、LiDAR-SLAMやビジュアルSLAM、3次元マッピングなどの独自の技術開発を行っている。一方、子機を載せて13㎞の海上上空を安定して飛行した大型機体2機(1機は電波中継用)は物流などで実績のある五百部商事製機体、ミッション1と2用に中型機体が飛行したが、これは実績のあるAutonomy HD製汎用機体である。無線通信系はTKKワークスとスペースタイムエンジニアリングが担った。このように、最先端研究と実績重視の機体や通信システムなどの強みを組み合わせることで、実用性の高いシステムが短期間で開発された。
このように短期決戦で、ミッションが明確に決まっている競技は、システムインテグレーションの技術力が重要で、産官学連携や産学連携により、強みを組み合わせることで確実に良い成果があげられると思われる。もちろん、複数の大学による共同研究チームも有効かと思われるが、企業の場合は大学のプロトタイプ製作プロセスとは異なり、量産することによる品質保証の観点が一般に強みであり、信頼性や耐久性において優れていることが多い。したがって、各大学が得意とする技術分野を分担し、統合システムとして完成させるアプローチの際に企業の知見を得ることは、効率的かつ効果的であると考える。
さらに、表3~表5と表2を比較すると大きな違いに気が付く。表2のHEDCの場合、1位~3位までは大学と企業の連携、または、台湾工業技術研究院のようにドローン関係の関連分野が連携したチームになっている。参加は辞退したが、スタートアップの台湾の会社やインドの会社が単独でエントリーしている。一方、表3のプラントチャレンジでは3位のMISORA+UoA以外はすべて大学単独のチームになっている。表4のシミュレーションの場合も1社を除いてすべて大学単独のチームである。表5のSTMチャレンジも1位の産学連携チームやインドネシアチームを除くとすべて大学単独チームである。社会実装のことを考慮すると企業の知見や実績は重要であり、目的意識的に産学連携チームの醸成を促進することが重要と思われる。
大会運営と安全管理の取組み
WRS2025過酷環境F-REIチャレンジの成功は、綿密な大会運営と徹底した安全管理によって支えられた。ロボットやドローンを用いた競技は、適切な管理がなければ重大な事故につながる可能性がある。WRS2025実行委員会は、参加者、運営スタッフ、観覧者すべての安全を最優先として、包括的な安全管理体制を構築した。
法令遵守の徹底
航空法、電波法、労働安全衛生法など、関連するすべての法規制を厳格に遵守した。特にドローンの飛行については、国土交通省への飛行許可申請、飛行経路の事前承認、飛行高度と範囲の制限など、法令に基づく手続きを完全に実施した。また、電波法についても海外の電波法との大きな相違点があることから、総務省との話し合いを持って、海外チームが参加しやすい環境作りに務めた。
安全飛行管理システム
すべてのドローンに万一墜落してもすぐ場所が特定できる位置追跡システムを搭載し、同時にGCSによりリアルタイムで飛行状況を監視した。飛行禁止区域への侵入を自動的に防ぐジオフェンス機能、異常時の自動着陸機能など、多層的な安全機能を実装した。また、万一の海上への墜落に関してはエアバッグ状のフロートを搭載して、水没防止に心がけた。
緊急対応体制
HEDCに関しては、ミッション1、2および3のエリアに安全管理要員を配置して万全の態勢を構築した。同時に、海上にもボートを6艘配置して、万一の墜落に対して機体回収が可能な体制を敷いた。したがって、13㎞の海上飛行中にどこかの安全管理要員かボート搭乗の安全管理要員が機体を追跡できる体制であった。さらに、万一に備えて救急車などの手配を即可能となるように万全を期し、事故に即座に対応できる体制を整えた。消火設備、救急医療器具、通信機器などを完備し、緊急時の連絡体制を明確にした。競技委員会、運営委員会、審査委員会、安全管理委員会、会場設営委員会、安全管理要員総勢で、約百十数名が全員トランシーバーを保持して、互いに関係メンバーに連絡できる体制を構築した。同時に、事故発生時の対応手順書を事前に策定し、全スタッフに周知徹底した。
観覧者の安全確保
競技エリアと観覧エリアを明確に分離し、十分な安全距離を確保した。観覧エリアには保護ネットや障壁を設置し、ドローンの落下や部品の飛散から観覧者を守った。また、観覧者への安全説明を徹底し、危険行動の防止に努めた。
競技中の事故防止策
各競技の開始前には、必ず安全ブリーフィングを実施し、参加チームに安全規則を再確認させた。競技中は、複数の安全監視員が配置され、危険な状況を早期に発見し、必要に応じて競技を中断する権限を持っていた。
ドローンの飛行エリアには、ジオフェンスをあらかじめ飛行チームにアナウンスしてジオフェンス境界監視システムが確実に機能することを検証し、飛行範囲の逸脱を即座に検知できるようにした。また、すべてのドローンには自動着陸機能が実装され、制御不能となった場合には安全に着陸できるようターミネーション機能を付加した。
プラント災害チャレンジとシミュレーション災害チャレンジでは、実際の煙や高温環境が使用されるため、特に厳重な安全管理が行われた。火災検知システム、自動消火装置、換気システムなどが完備され、常時監視された。
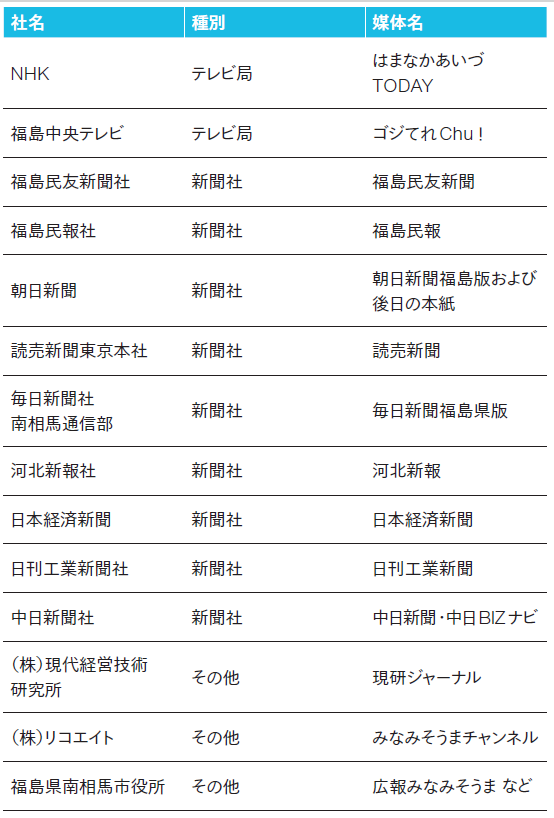
メディア露出と社会的反響
WRS2025過酷環境F-REIチャレンジは、メディアからも大きな注目を集め、災害対応ロボット技術への社会的関心を高めることに成功した。表6はメディア取材受付状況を示している。大会の様子は、テレビ、新聞、インターネットメディアを通じて広く報道され、多くの人々にロボティクス技術の最前線を知ってもらう機会となった。
表6 メディア取材受付状況
ライブ中継と動画配信
大会の全競技は、高画質でライブ中継され、世界中から視聴可能であった。複数のカメラアングルを用意し、ドローンの飛行視点、操縦者の様子、審査員の評価など、多角的な映像を提供した。また、専門家による解説が加えられ、技術的な側面も分かりやすく説明された。
ライブ中継は、YouTubeで配信され、ロボット研究者を中心に3日間で累計約1万人が視聴したと想定される。特に、最終日の日曜日は休日と晴天に恵まれて同時視聴者数が増加し、大きな盛り上がりを見せた。
図39にHEDCのYouTubeライブ中継を、図40にYouTubeライブ中継GCSの画面と和英同時翻訳を、図41にプラント災害チャレンジのYouTubeライブ中継を、図42にシミュレーション災害チャレンジのYouTubeライブ中継を示している。

図39 HEDCのYouTubeライブ中継
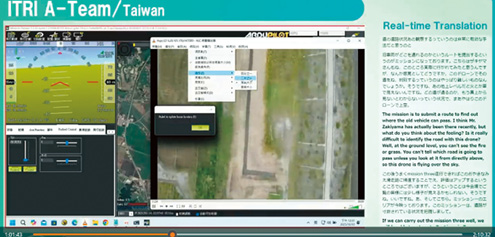
図40 YouTubeライブ中継GCSの画面と和英同時翻訳

図41 プラント災害チャレンジのYouTubeライブ中継

図42 シミュレーション災害チャレンジのYouTubeライブ中継
また、図43に標準性能評価ドローン(STM)チャレンジ審査風景を示している。審査委員は常に最低でも複数名が配置されており、厳格で公正な審査を心がけている。なお、「各競技には審査に関する詳細なガイドラインと詳細な項目ごとの得点をあらかじめ設定してあり、それらを加算し集計して、各チームの得点が決まる」方式を採用した。

図43 標準性能評価(STM)ドローンチャレンジ審査風景
今大会で明らかになった課題と改善点
WRS2025過酷環境F-REIチャレンジは、多くの技術的成果を生み出した一方で、実用化に向けて解決すべき課題も明らかにした。これらの課題を正確に認識し、体系的に取り組むことが、次の大会に向けて、あるいは、今後の技術発展には不可欠である。ここでは、大会を通じて浮き彫りになった主要な課題と、その改善に向けた方向性を論じる。
自律性のさらなる向上
現状のロボット・ドローンは、あらかじめ想定されたシナリオには高度に対応できるが、予期せぬ状況変化への適応力にはまだまだ限界がある。完全自律でのミッション遂行には、より高度なAI技術、特に状況理解と判断能力の強化が必要である。いっそうの自律性への高度化に向けて、深層強化学習や大規模言語モデルの活用など、最新のAI技術の統合が期待される。
通信環境の安定化と冗長化
災害現場では、通信インフラが損傷している可能性が高く、安定した通信の確保は大きな課題である。メッシュネットワーク、衛星通信、5G技術などの複数の通信手段を統合し、冗長性を持たせたシステムの開発が重要である。また、通信遅延や帯域制限下でも効率的に動作するプロトコルの最適化も必要である。
過酷環境下での耐久性向上
実際の災害現場は、競技以上に過酷な環境となる可能性がある。極端な温度、腐食性ガス、粉塵、放射線など、さまざまな環境要因に対する耐性を強化する必要がある。材料科学、シール技術、冷却システムなど、ハードウェアの根本的な改良が求められる。
エネルギー源の革新
現状のバッテリー技術では、飛行時間や作業時間が制限される。より高エネルギー密度のバッテリー開発、燃料電池の活用、無線給電技術など、エネルギー供給の革新が必要である。また、省エネルギー設計や効率的な飛行制御により、同じエネルギーでより長時間の運用を可能にする取組みも重要である。
競技ルールの明確化と柔軟性
一部の競技において、ルールの解釈に曖昧さがあり、参加チーム内で混乱が見られた。競技ルールをより明確に定義するとともに、技術の進歩に応じて柔軟に更新していく仕組みが必要である。また、評価基準をより客観的かつ定量的にすることで、公平性と透明性を高めることができる。
システム統合の課題
個別の技術要素は高度に発展している一方で、それらを統合した総合システムの開発には課題が残る。本大会でもその脆弱性が多く露呈した。センサーフュージョン、制御系の統合、ユーザーインターフェースの最適化など、システム全体としての完成度を高める必要がある。
特に、人間とロボットの協調作業における課題は大きい。ロボットが完全自律で作業できない場合、人間がどのように介入すべきか、その最適なバランスを見出す必要がある。人間の高度な判断能力とロボットの精密な作業能力を効果的に組み合わせるヒューマン・ロボット・インタラクション(HRI)の研究が重要である。
今後の展望と技術開発の方向性
WRS2025過酷環境F-REIチャレンジで明らかになった成果と課題を踏まえ、今後の技術開発の方向性が明確になってきた。災害対応ロボット技術の実用化と社会実装に向けて、技術面、制度面、そして人材育成の面から、総合的な取組みが必要である。
次回大会に向けた技術目標
次回のWRS過酷環境F-REIチャレンジに向けては、より高度な技術課題が設定されることが予想される。完全自律でのミッション遂行、複数ロボットの高度な協調運用、極限環境下での長時間作業など、実際の災害現場により近い条件での技術実証が求められるだろう。
AI技術の高度化
深層学習、強化学習、大規模言語モデルなど、最新のAI技術を統合し、より高度な状況理解と判断能力を実現する。
協調システムの発展
異種ロボット間の効果的な協調、人間とロボットのシームレスな連携、分散意思決定システムの構築を推進する。
ハードウェアの革新
新素材、新エネルギー源、小型高性能センサーなど、ハードウェアの根本的な進化を追求する。
災害対応ロボットの実用化促進
技術が成熟してきた今、実際の災害現場での活用を本格的に進める時期に来ている。消防、警察、自衛隊などの災害対応機関との連携を強化し、実運用に向けた実証実験を積極的に行う必要がある。
実用化に向けては、技術的課題だけでなく、法規制や運用体制の整備も重要である。航空法、電波法などの関連法規を、ロボット技術の発展に合わせて適切に更新する必要がある。また、災害対応機関の職員に対する訓練プログラムの開発も不可欠である。
さらに、ロボット技術を活用した災害対応の標準手順(SOP)を策定し、各機関で共有することで、効果的な運用が可能となる。
まとめ:WRS2025過酷環境F-REIチャレンジの意義と成果
WRS2025過酷環境F-REIチャレンジは、災害対応ロボット技術の発展において重要な節目となった。3日間にわたる競技を通じて、自律飛行技術、高度で繊細な遠隔操作技術、デジタルツイン連携、過酷環境適応能力など、多岐にわたる技術革新が実証され、同時に課題としても明確化した。参加チームが示した高度な技術と創造性は、災害対応技術の実用化が現実のものとなりつつあることを明確に示している。
技術的成果の総括
自律飛行技術が非GPS環境下で一部実用レベルに近づきつつあり、建屋内部でも安定した飛行と高精度な3Dマッピングも実現できる直前まできた。デジタルツイン技術との連携により、遠隔操作の精度と安全性が飛躍的に向上する可能性を検証した。また、煙や通信障害などの過酷環境下での作業能力も一部改善され、実際の災害現場での活用に必要な課題が明確化された。
多様な競技による総合評価の成功
4つの異なる競技を通じて、災害対応ロボット技術を多角的に評価するアプローチは極めて効果的であった。過酷環境ドローンチャレンジは実践的な救援活動能力を、標準性能評価ドローンチャレンジは基礎性能の客観的測定を、プラント災害チャレンジとシミュレーション災害チャレンジは産業応用の実用性を、それぞれ明確に示した。この多層的な評価により、技術の強みと弱みを正確に把握できた。
産学官連携の深化
大学、企業、政府機関が緊密に連携し、基礎研究から実用化まで一貫した技術開発が推進できる環境が整備される状況になりつつある。若手研究者や学生チームの活躍も目覚ましく、次世代の技術革新を担う人材が着実に育成されている。国際的な技術交流も活発に行われ、グローバルな視点での技術発展の基盤が形成された。
社会的認知度の向上
大規模なメディア報道とオンライン配信により、災害対応ロボット技術への社会的関心が大きく高まった。特に、次世代を担う子どもたちに技術の魅力を伝えることができたことは、長期的な技術発展の基盤となる。地域社会との連携も深まり、福島が世界的なロボティクス技術の拠点であることが広く認識された。
今後の課題解決に向けた明確な指針
大会を通じて、実用化に向けた課題も明確になった。自律性のさらなる向上、通信環境の安定化、過酷環境下での耐久性強化、エネルギー源の革新など、解決すべき技術課題が体系的に整理された。これらの課題に対しては、具体的な研究開発の方向性が示されており、次回大会に向けた技術目標も明確である。
特に重要なのは、技術開発と実用化を並行して進めることである。実際の災害対応機関との連携を強化し、現場のニーズを的確に反映した技術開発を推進する。同時に、法規制の整備、運用体制の構築、人材育成など、社会実装に必要な基盤整備も進める必要がある。
謝辞と今後の協力体制への期待
WRS2025過酷環境F-REIチャレンジの成功は、多くの関係者の献身的な努力と協力によって実現された。本章では、大会の開催を支えてくださったすべての方々に感謝の意を表するとともに、今後の継続的な協力と発展への期待を述べる。
共催・後援団体への感謝と競技のあり方について
共催の経済産業省及び後援いただいた復興庁、福島県、南相馬市、浪江町には、本大会の企画から実施まで、全面的な支援をいただいた。特に、福島ロボットテストフィールドという世界最高水準の実証環境を提供していただいたことは、高度な技術実証を可能にする決定的な要因となった。
本戦開催中に関しては一定の経費が配分されたが、本戦に至るまでの準備期間の研究開発費は膨大であり、何らかの対応が必要と思われる。海外でのこうした競技会は、書類審査で一定チーム数を選考した後、選ばれたチームは一定の予算の提供を受けて本戦に望むというのが一般的である。過酷環境F-REIチャレンジも今後、優れた海外チームの参加を促すためには、競技のあり方も含めて検討する必要がある。
参加チームへの敬意
国内外から参加された全チームに、最大限の敬意と感謝を表する。長期間にわたる準備、創意工夫に満ちた技術開発、そして競技での真摯な取組みは、大会を成功に導く原動力となった。特に、限られた予算や人員の中で素晴らしい成果を上げた学生チームやスタートアップチームの努力は、称賛に値する。さらに、学生チームに献身的に研究開発の指導をされた指導教員の先生には、心から厚く御礼申し上げる。また、スタートアップチームにおかれては通常のビジネス以外の追加のお仕事に、開発費を工面していただき寝食を忘れてご尽力されたことを想像すると胸が熱くなる。是非とも、社会実装されて開発費の回収を、いや、新規ビジネスへの芽を創生して、大きなビジネスマイルストーンを描いていただきたく祈念したい。
運営スタッフと関係者
大会運営に携わった総勢数百名のスタッフ、安全管理チーム、会場設営チーム、審査チーム、管理運営チーム、技術サポート要員、医療スタッフ、メディア関係者、HEDCに関しては地権者や漁業関係者など、すべての関係者の献身的なご協力とご理解、献身的なご尽力に深く感謝する。本戦は3日間であったが、それ以前の準備期間から長期間・長時間の業務を、高い専門性と責任感を持って遂行していただいた。特に、大会事務局をお引き受け頂いた日刊工業新聞社および国際レスキューシステム研究機構(IRS)、NTTデータ経営研究所の皆様に心から御礼申し上げたい。
地域社会の支援
福島県、南相馬市、浪江町をはじめとする地域社会の温かい支援と協力に感謝する。宿泊施設の提供、交通手段の確保、地域住民の理解など、多方面からの支援が大会の円滑な運営を支えた。また、多くの地元住民の方々が観覧に訪れ、大会を盛り上げてくださった。
産業界と学術界への協力の呼びかけ
災害対応ロボット技術の発展と実用化には、産業界と学術界のさらなる連携強化が不可欠である。企業には、実用化に向けた投資の拡大と、現場ニーズを反映した技術開発の推進をお願いしたい。大学・研究機関には、基礎研究のさらなる深化と、産業界との積極的な技術移転を期待する。
特に、若手研究者や学生に対する支援の充実は重要である。奨学金、研究費、インターンシップの機会などを通じて、次世代の技術者を育成することは、長期的な技術発展の基盤となる。産学官が一体となって、人材育成の仕組みを強化していくことが求められる。
参考資料
(過酷環境F-REIチャレンジの様子がYouTubeで現在放映中です。ぜひご覧下さい)
- 過酷環境ドローンチャレンジ(HEDC)
【1日目】
【2日目】
【3日目】 - プラント災害チャレンジ
【1日目】
【2日目】
【3日目】 - シミュレーション災害チャレンジ
【1日目】
【2日目】
【3日目】 - 標準性能評価ドローンチャレンジ(STM)
【1日目】
【2日目】
【3日目】
<名誉員>
野波 健蔵
◎福島国際研究教育機構(F-REI) ロボット分野長
◎専門:ロボット工学・ドローン工学