
業界の動き
過酷環境ロボティクスへの挑戦

― F-REI ロボット分野のミッションと目指すところ ―
– 福島国際研究教育機構-
はじめに
本誌8月号において、福島国際研究教育機構(Fukushima Institute for Research, Education and Innovation, F-REI)の設立の背景から、F-REIの理念、機能、組織、施設設備準備状況と5つの研究分野について概要が紹介されている(1)。そこで、本稿は5つの研究分野の1つであるロボット分野について最新の状況を紹介する。
ロボット分野の基盤研究と応用研究の相関関係
ロボット分野の研究戦略
ロボット分野の研究内容を俯瞰的に示したのが表1である。基盤研究として、①耐環境・高機動化技術、②高度知能化技術、③機能拡張技術をコア(基幹)技術とする。
表1 ロボット分野の研究俯瞰(基盤研究と応用研究)
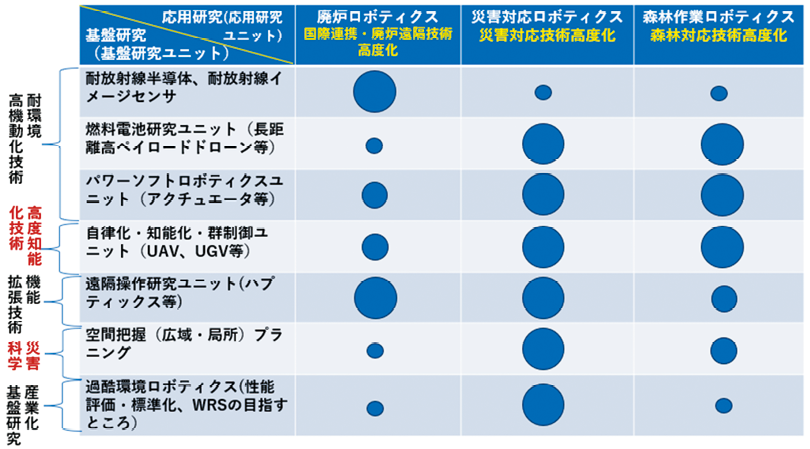
これに加え、災害下でのロボット・ドローン活用のための性能評価・標準化と災害科学を加えたユニットを創生する予定である。上記の三つの基盤技術を基礎に、産業化実装の応用分野として①廃炉ロボティクス、②災害対応ロボティクス、③森林作業ロボティクスの研究開発を見据える。とくに、F-REIならではの強みとなる、「過酷環境ロボティクス」を特徴とする研究とすることで、国研や大学などのロボティクス研究と差別化した新しい研究領域を形成し、我が国独自の先端技術の確立を目指す。表1で円の大きさは3種類あるが、影響度を3段階で示している。
過酷環境ロボティクス
ここで過酷環境とは何かを定義する。『過酷環境(極限環境)とは、温度、圧力、放射線、重力、磁力、pHなどが、一般的な生物(人間も含む)が生息できる条件から大きく逸脱した環境』と定義できる。こうした過酷環境で人に代わって、ロボットが作業を行うことはロボットの利活用として最も理想的な使い方である。このためにはこうした過酷環境で耐えられるロボット技術である必要がある。また、過酷環境ほど、ロボットの自律性が求められる。F-REIロボット分野が掲げる過酷環境は言うまでもなく高放射線環境を指している。高放射線環境は廃炉環境のみならず、宇宙環境も同様であり、その意味では過酷環境ロボティクスは宇宙ロボティクスとも共通点を有している。
ロボット分野の基盤研究
基盤技術の3つのコア技術の中で、耐環境・高機動化技術は、廃炉ロボットに要求される耐放射線半導体や耐放射線イメージセンサの研究開発や、長距離高ペイロード飛行を可能とする燃料電池研究、エクソスケルトンのように人が高重量物を搬送可能なパワーソフトロボティクス研究で構成されている。高度知能化技術は、UAV(Unmanned Air Vehicles: 無人航空機)やUGV(Unmanned Ground Vehicles: 無人車両)などの高度な自律化・知能化・群制御の研究である。機能拡張技術は人間の手の感触を代替できるハプティクス(触覚学のことで、人は、触った感触から物の強度や重さを判断し、力加減を調整することができる)に代表される遠隔操作研究、災害科学は広域空間や局所的な空間を時々刻々正確に把握し、デジタルツインなどで災害予測も行い、被害を最小化するアクションプラニングまで行う研究である。産業化基盤研究はWRS2025過酷環境F-REIチャレンジなど(2)(3)を通じて、世界から過酷環境ロボティクスに適した優れた技術を発掘することで、性能評価や標準化を進めていき、F-REIが過酷環境ロボティクス標準化で貢献することを目指している。
ロボット分野の応用研究
応用研究については、三つの大きな分野を設定している。一つはF-REIが設立された理由でもある福島第一原子力発電所の原子炉メルトダウン事故に関して、廃炉ロボティクスはロボット分野の最重要テーマである。国は廃炉まで40年のロードマップを掲げているが、現状は極めて厳しい状況にある。F-REIロボット分野は10年後の廃炉ロボティクスを展望しながら、10年後に必要となる技術の研究開発を進めている。
二つ目は災害対応ロボティクスである。東日本大震災直後に発生した原発事故で、日本のロボット技術は十分に活躍できなかった。その反省と教訓をもとにF-REIの第一研究分野として誕生したのがロボット分野である。この観点から災害対応ロボティクスは大きなミッションを有しており、2030年以降に発生する激甚災害では、F-REIロボットが大活躍するというシナリオを描いている。災害大国日本として世界最先端の災害対応ロボットを研究開発して、海外で発生する大災害に対しても日本から派遣できるようにしたいと考えている。
三つ目の分野は森林作業ロボティクスである。水素爆発した原発事故後の放射線飛散エリアは福島県阿武隈山系全般に渡っており、民家周辺や田畑などの農地は除染が徹底して行われたが、山林は手つかずで、依然としてセシウム137の放射線量が下がらないという報告もある(4)。このため、こうした阿武隈山系の山林を先端的なロボット技術で3D化して、ホットスポットを含む線量マップ化、植生分析をして資源管理を行い、森林で木材として価値あるものは、森林作業ロボットで切り出し有効活用するということである。
基盤研究を推進するユニット研究
表1に示すように、ロボット分野では基盤研究として、すでに四つのユニット研究がスタートしている。ユニット研究とはユニットリーダーのもとに、約10名程度の研究者、技術者が集まって研究を進める研究組織のことである。
このユニットの主要なミッションは、従来の大学や国立研究機関のような独創的な研究論文を発表することに主眼を置くことはもちろん、独創的研究成果を実システムとして完成させて、社会実装して産業化を図るということに一層、重点を置いているのがF-REIの特徴である。F-REIが掲げる「創造的復興」の産業化を、各ユニットの研究開発を通して実践していくということである。
ロボット分野の場合は、独創的な廃炉ロボットを製作して、廃炉作業現場に投入することであり、独創的な災害対応ロボットを製作して、災害現場で活躍する自衛隊、消防、警察に活用してもらうことであり、森林作業ロボットを製作して、阿武隈山系の林業従事者に利用してもらうことである。
ロボット分野では5年後の2030年ごろには、約10ユニットの研究組織を醸成して、研究者および技術者が約100名程度集う、世界に冠たるロボット研究のメッカとなる組織を目指している。この場合、リサーチエンジニアと称する専門家を各分野に多数配置して、海外のトップ研究機関のように研究者は研究に専念できる体制を構築することを目指している。
ユニット研究の紹介
燃料電池研究ユニット(ユニットリーダー:飯山明裕)
災害時、道路が寸断されたり、家屋が倒壊したりすると、人が現場に赴いて状況確認や救助を行うことは難しくなる。このような状況下での活躍を期待されているのが、ドローンである。空からアプローチするドローンなら、人間が入れない過酷な環境下への到達も可能で、現場の様子や住人の安否、インフラの状況を確認したり、物資を届けたりすることもできる。だからこそ本ユニットでは、有事の際に役立つ強靭なドローン、具体的には10kg程度の荷物を運び、2時間程度飛行できるドローンの実現を目標としている。ただ多くのドローンに使われているリチウムイオン電池などでは、目標とする「強さ」を実現できない。そこで本ユニットは、水素を用いた燃料電池システムの開発をテーマに研究を実施する。福島県内企業とともに国産のドローン用燃料電池システムを構築し、災害時に役立つドローンの実現へとつなげていく。図1は飯山ULである。
図1 飯山明裕ユニットリーダー
(1)ドローン用水素燃料電池システムの開発
図2に燃料電池研究ユニットの三つの研究領域を示すが、メインは技術領域Iの水素燃料電池システム本体である。高効率高耐久な触媒と電解質膜を用いた膜電極接合体(MEA)を開発し、軽量で熱伝達の良い冷却フィンと組み合わせて、小型で軽量な空冷燃料電池スタックを開発する。さらに、軽量な水素供給系(高圧タンクあるいは水素生成式)などを用いることで、世界トップレベルの軽量で高効率なドローン用燃料電池システムを開発する。
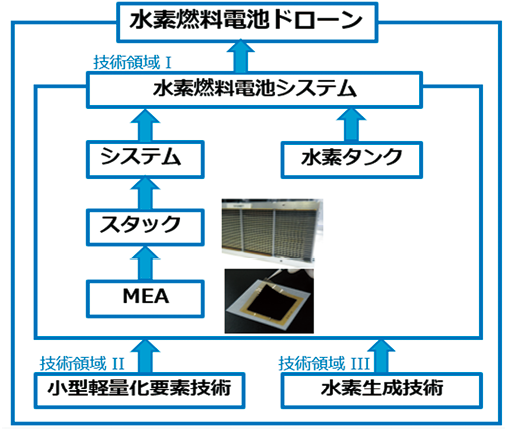
図2 ユニット研究の三つの研究領域
(2)燃料電池の小型軽量化要素技術の研究開発
小型軽量化に有効な最新の軽量材料・部品・シール・接着技術を研究開発する。
(3)小型軽量水素生成装置の開発
革新的な小型軽量水素生成装置技術を構築する。
(4)期待される研究成果
期待される研究成果としては、災害時などの過酷環境下において、避難所支援や発災初期対応などが可能な、高機動性を有するドローンが期待できる。燃料にグリーン水素を用いることで、脱炭素に貢献できるドローンが期待できるなどである。
パワーソフトロボティクスユニット(ユニットリーダー:鈴森康一)
「アクチュエータ」とは、電気や空気圧、油圧などのエネルギーを「動き」に変換し、機器を動かす駆動装置のことである。現在のロボットや機械のほとんどは、電気モータとギアを組み合わせたアクチュエータで動いている。しかし雨や埃、衝撃、振動、高温などといった過酷な環境でも動き続ける性能を実現するためには、新たなアクチュエータの開発が必要となる。本ユニットで進めているのは、過酷環境下ロボット用の新しいアクチュエータと、それを用いた災害対応ロボットの開発。過酷な環境下でも働くことができたり、非常に大きなパワーを発揮できたりする一方で、器用で優しく対象物を取り扱う、「心優しい力持ちロボット」の実現をめざしている。具体的にはそれを身につけた人が数百kgの重量物を持ち上げられるような、図3に示すようなパワーサポートスーツを検討中である。災害時の救助活動など有事の際の対応はもちろん、森林整備や、物流、建築作業、工場など平常時にも社会に役立つロボットを生み出していくことが本ユニットの目標である。図4は鈴森ULである。

図3 人工筋肉によって動作するパワーサポートスーツの一例

図4 鈴森康一ユニットリーダー
(1)強靭・繊細ロボット機構(tough & gentle)
油圧駆動系が本来持つ高パワー密度・耐衝撃性・耐環境性と、本研究ユニットが有する小型・低摺動・軽量を特徴とする油圧技術を活用して、「優しい力持ちロボット」(具体的には、大きな力、衝撃や環境に対して強い、小型、多自由度、力制御が可能)の実現を目指す。
(2)パワーソフトロボット機構
インフレータブル構造、細径人工筋肉といった空圧デバイスを活用して、超軽量・高可搬性・高収納性・安全性・量産性に富む、実用的なロボットの実現を目指す。
自律化・知能化・群制御ユニット(ユニットリーダー:富塚誠義)
自動で荷物を配達するドローン、ドライブをより快適なものとする自動運転などがニュースで話題になっているように、輸送の分野における自動制御の技術は近年めざましい進化を遂げている。ドローンに代表されるUAVと、自動運転技術をさらに発展させたUGV、これらは実は輸送だけでなく、災害救助にも役立つ技術である。本ユニットではUAV・UGVそれぞれの長所を利用し、災害対策のための高度な自動化システム構築に挑戦する。AI技術を駆使することで、自動制御を超えた自律制御ロボット、つまり自分で考えて行動することができ、ほかのロボットや人と協調して動けるロボットを、ハードウェアとソフトウェアの両面から総合的に開発する。今後は、災害現場を模した実験場でデモンストレーションも行う予定である。机上の空論ではない、実際に現場で役立つ技術開発に取り組んでいく。図5は富塚ULである。

図5 富塚誠義ユニットリーダー
(1)UAVとUGVロボット群の協調制御システムの研究開発
UAVやUGV単独では達成が困難な方策を実施することが求められる。このため、自律制御・知能制御・群制御・協調制御をUAV/UGVロボット群に適用して世界トップレベルの知能型災害対応ロボットを実現する。特に、UAVまたはUGV単体の既存の自律・知能制御の結果をUAVロボット群、UGVロボット群、UAV/UGVロボット群に拡張する。災害時には予告、避難誘導、被害状況の把握、救援、救助などの多様な対応に対して、UAV・UGV群が役割分担を行なって対応するシステムを研究開発する。
(2)UAV・UGVロボット群と人間の共同システムの研究開発
すべてをロボットに任せるのではなく、 UAV・UGV群と人間が協力して共同で災害に対処するのが現実的であり、かつこれまでの災害対策の知見を活かすことができる。これを安全にかつ効率的に実現させるために必要となるセンサ・画像処理技術を含めた知能化制御システムの研究開発を行う。
(3)協調制御と共同システムを支援するAI技術の研究開発
上記二つの課題についてはAI技術を駆使した支援が効果的である。AI技術をどのように利用するかに関する研究を行う。
(4)期待される研究成果
災害、救急などの緊急時にリアルタイムでの安全な救援活動を可能にして、被害を最小に留めるロボットが期待される。図6のように、ロボット群と人間を共同させることによりこれまで災害対応をしてきた人間の知見を活かしつつ、人手も格段に減らして2次災害をなくすことも期待できる。

図6 UAV群とUGV群が災害派遣のレスキュー隊を支援
遠隔操作研究ユニット(ユニットリーダー:大西公平)
本ユニットは、高温、高湿、高線量、真空など、過酷な環境下でも作業ができる遠隔操作ロボットの研究開発を行っている。研究の第一段階としてめざしているのは、複雑な電子部品やコンピュータを搭載しなくても、自由自在に遠隔操作できるロボットの開発を行う。それに成功した暁には、ロボットに「リアルハプティクス技術」を導入して、より繊細な作業が行える性能を搭載する予定である。図7のように、やわらかくて壊れやすいものは優しく、重たくて頑強なものは力を込めて触る。ロボットがこういった判断を自律的にできるようになれば、より繊細な作業を任せることが可能になる。器用で優しい動作で、私たちを助けてくれる、そんなSF小説や映画に登場するようなロボットを「力触覚」という観点から実現することが、本ユニットの最終目標である。図8は大西ULである。
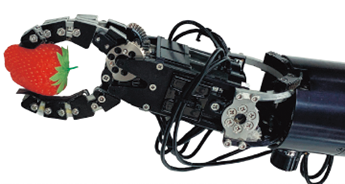
図7 リアルハプティクス技術により、人の指先のような力加減で、遠隔操作ロボットがイチゴを優しく掴む
図8 大西公平ユニットリーダー
(1)遠隔操作ロボットシステムの研究開発
過酷環境において力触覚伝送機能を有し、最小自由度にてミッションを達成する遠隔側ロボットと 操縦者と一体で低負荷で動作する手元側ロボットを実現する。
(2)遠隔操作制御コンソールの研究開発
手元側と遠隔側のロボットに対し サイバー空間と同期を取りながら作業スキルを移植することで、安全で確実な動作指令を生成する知能化制御システムを実現する。
(3)負担が少なく操作しやすい操縦システムの研究開発
操作者やロボット間の協調により機能を分割して、遠隔操作下においてミッションを達成する操縦システムを実現する。
(4)期待される研究成果
災害、救急などの緊急時にリアルタイムでの安全な救援活動を可能にし、被害を最小に留めるロボットが期待される。遠隔側を自動化することで人手に頼る非定型作業を専らにする農林水産業、建設業、福祉介護などを含むさまざまな産業で、人の代わりをするロボットシステムが期待できる。さらに、民生に転用することで高齢者や弱者などに物理的に寄り添い QOLを向上させるロボットが期待できる。
委託研究の紹介
現在推進中のロボット分野の七つの委託研究(5)
耐放射線性に優れたダイヤモンド半導体の要素技術開発
耐放射線性に優れたダイヤモンド半導体技術により、将来的に廃炉や宇宙環境で使用可能な、ダイヤモンド半導体を用いたマイクロプロセッサーやメモリの基礎となる要素技術開発を行う。
高耐放射線(メガグレイ級)イメージセンサの研究開発
高い耐放射線性を有するシリコンカーバイド半導体(SiC)によるイメージセンサの開発を行う。
フィールドロボットなどの市場化・産業化に向けた性能評価手法の標準化事業
災害対応やインフラ点検などで活躍するフィールドロボットの社会実装と普及のため、市場化・産業化を意識した性能の評価手法の標準化や法制度整備に貢献する評価手法の検討を行う。特に、図9に示すWRS2025過酷環境F-REIチャレンジのフィールドロボット国際競技会を福島で開催し、これらの評価手法を競技ルールなどに反映させることで、多くの参加者が使用することによるデファクトスタンダード化を図る。

図9 過酷環境F-REIチャレンジ
困難環境の課題を解決する「空間エージェント網」の研究
災害などの困難環境において、単体のロボット・ドローンだけでは必要とされる機能を発揮できない場面が多い。さまざまな機能エージェントが多数で協力して困難課題を解決する「空間エージェント網」という概念を実現し、多様なロボット・ドローンが困難環境下で機能を発揮できる基盤を構築する。
ドローンによる森林内環境の3次元マップ作成システムの構築
急峻な傾斜地が多く林道なども整備が十分でない日本の森林環境では、森林環境での作業をロボットなどの利用により自動化することに多くの課題がある。本事業では障害物が多く、正確なGPS情報の取得が難しい森林内で飛行可能なドローンを開発するとともに、ドローンに木材資源量や放射線量の計測センサを搭載して3次元マップを作成する。さらにデジタルツインを活用したDX化を進める。
環境放射能動態調査のための水中ドローンの開発と実証
湖沼の環境放射能動態調査のための水中ドローンを開発し、環境放射能動態調査の効率化を図る。
ロボットスマートプログラミング環境を用いたロボット開発環境と人材育成に向けた研究
ロボット開発のためのスマートプログラミング環境およびロボット性能評価手法の研究を行い、実機での検証も含めたロボットスマートプログラミング環境を構築し、ロボットソフトウエア開発および性能評価へ適用して、ロボット人材育成の教育ツールを目指す。
おわりに
本稿では2023年4月から2025年5月までのF-REIのロボット分野の約2年間の活動の成果を紹介した。筆者は2023年春に、山崎光悦理事長から「ロボット分野の立ち上げをお願いしたい」と大役を仰せつかって、2年間無我夢中でロボット分野の立ち上げを行ってきた。ただ、研究組織をゼロから作って行くという、通常はまず経験できない機会に恵まれたことはこの上ない名誉と感じている。そして、世界に冠たる組織にするということで、基盤研究や応用研究の内容を固めながら、ロボット分野が目指す学術分野の総称は「過酷環境ロボティクス」であると閃いたときは、大変高揚したことを記憶している。この2年間で各専門分野の世界的にトップレベルの先生方にメンバーになって頂きながら、ロボット分野の骨格が出来てきた。手探りの状態から少しづつ明かりが見えてきたというのが率直な感想である。まだ、2030年の目標であるユニットリーダー10名、研究者・技術者100名の規模感からすると、達成率は40%レベルである。実は、F-REI予算の執行による研究成果が表れてはじめてF-REI研究成果であり、その意味では現状は虎の威を借るレベルで、これからが正念場であると認識している。
そして、ロボット分野の立ち上げに関して、最初から献身的に貢献いただいている松野文俊副分野長に心から感謝します。
最後に、「過酷環境ロボティクスへの挑戦」を掲げて、世界に冠たるロボット分野の拠点構築に向けて邁進しているF-REIロボット分野に、ご関心のある研究者・技術者の皆様、是非、ご一報をお願いいたします。
参考文献
(1) 森下 信,福島からはじまる未来・F-REIが世界を変える,日本機械学会誌8月号,2025.
(2) https://worldrobotsummit.org/
(4) https://www.asahi.com/sdgs/article/14365451
(5) https://www.frei.go.jp/research_and_development/ongoing_commissioned_project.html
<名誉員>
野波 健蔵
◎福島国際研究教育機構(F-REI) ロボット分野長
◎専門:ロボット工学・ドローン工学
キーワード:業界の動き
表紙:経年変化してグラデーションに紙焼けをした古紙を材料にコラージュ作品を生み出す作家「余地|yoti」。
古い科学雑誌を素材にして、特集名に着想を受け、つくりおろしています。
デザイン SKG(株)
表紙絵 佐藤 洋美(余地|yoti)