17. ロボティクス・メカトロニクス
17.1 総論
17.2 World Robot Summitの状況
17.3 産業分野
17.3.1 市況/17.3.2 トピック/17.3.3 技術動向/17.3.4 研究動向/17.3.5 各国国策動向/17.3.6 まとめ
17.4 オープンソースソフトウェア・ミドルウエア
17.5 AI/深層学習の注目技術
17.6 宇宙ロボット分野の注目技術
17.6.1 小惑星探査のためのロボット技術/17.3.2 月・火星探査ローバー
17.7 サービス分野でのロボット動向
17.8 ロボット関連プロジェクトの動向
17.9 注目技術動向
17.1 総論
ロボティクス・メカトロニクス分野は,その成り立ち,すなわち機械とコンピュータの異分野の融合から生まれた歴史からして,新たな知識,技術,概念を取り込む柔軟性,包容力,チャレンジ精神を有している.近年では,IoT,AI,5Gなどの新技術,新概念が次々と発表され,実用化を目指した研究開発が活発に行われている.ロボティクス・メカトロニクス分野はこれら新たな技術,知識とも密接に関わる,我が国が最も得意とする分野であり,新技術をいち早く取り入れ,産業を発展させていく原動力となることが期待されている.本項では2019年にロボティクス・メカトロニクス分野で話題となった出来事,研究動向,プロジェクトを中心に紹介する.
まず,「ロボット革命イニシアチブ」の活動の一つとして2020年に計画されている国際ロボット競演会World Robot Summitに向け,プレ大会の試行などの準備が着々と進められている.本大会はCOVID-19流行の影響で2021年以降に延期となったが、本大会に向けた現在の準備状況について紹介する.
また,近年のロボティクス・メカトロニクス分野では,RT-MiddlewareやROSなどのソフトウエアプラットフォームやオープンソースソフトウエアを積極的に活用し,ソフトウェア開発を加速する動きが盛んである.そこで近年のオープンソースソフトウエア,ロボットミドルウェアの動向について紹介する.
AIとロボットの融合により,自ら動作を学び,賢く巧みに複雑な作業を実行できる知能ロボットの研究開発も盛んに行われている.8月に行われた我が国最大のロボット展示会である国際ロボット展でも,多くのAI融合型産業用ロボットが発表された.
一方,宇宙分野でも,はやぶさ2に搭載された小型ローバMINERVAが小惑星リュウグウへの着陸,移動に成功し,小惑星表面で移動探査をした世界初の人工物として大きな偉業を成し遂げた.
一方,本部門最大のイベントである部門講演会ROBOMECHが,「産業を再興するロボティクス・メカトロニクス」をテーマに,約1,300件の最新技術の発表と2,000人を超える参加者で開催された.この中での注目技術を紹介する.
また,2018年から2019年にかけて,これまで進められていた戦略イノベーション創造プログラム(SIP)や革新的研究開発推進プログラム(ImPACT),NEDO「次世代人工知能・ロボット中核技術開発」などの大型プロジェクトが相次ぎ終了した.2020年からは,NEDO「革新的ロボット研究開発基盤構築事業」や「ムーンショット型研究開発制度」などが開始される予定であり,これまでの大型プロジェクトの動向と今後の課題について紹介する.
〔倉爪 亮 九州大学〕
17.2 World Robot Summitの状況
World Robot Summit(1)(以下,WRSと略記)は,経済産業省及びNEDOが,ロボットの社会実装をめざして世界のエクセレンスを集めて開催するロボット競演会である.ロボット競技会(World Robot Challenge;WRC)とロボット展示会(World Robot Expo;WRE)から構成される統合イベントである.そのプレ大会は,2018年に東京で開催された(2).2020年に,その本大会を,福島県(8月)と愛知県(10月)で開催する計画が進められている.1)競技会(WRC)は,a)ものづくり,b)サービス,c)インフラ・災害対応,d)ジュニアの4つのカテゴリーのチャレンジが企画されており,現時点では,a)からc)の3カテゴリーに対し,20の国・地域から,91チームの参加が1次登録されている.以下にその内容とこれまでの経過を概説する.1-a)ものづくりカテゴリーでは,一品ものづくり(One-off Manufacturing)を目指して,迅速かつ無駄なくスリムに対応できるシステムを構築する製品組立チャレンジを計画している.本大会では,事前に告知した製品とは異なる組み立て方となるサプライズ製品の生産要求を競技直前に行うことで,システムの立ち上げの迅速性を競う.1-b)サービスカテゴリーでは,人間とロボットが協働できる生活環境の実現を目指して,パートナーロボットチャレンジ(リアルスペース)とフューチャーコンビニエンスストアチャレンジを計画している.前者では,参加チームに充分な準備期間を与えて,速さ(Speed),滑らかさ(Smooth),安定(Stable),安全(Safe)の4S を競うこととし,後者ではロボット技術導入を前提とした未来のコンビニを模した競技フィールドを設置し競う.1-c) インフラ・災害対応カテゴリーにおいては,ロボットを使用したプラント災害予防やトンネル災害対応課題の達成と,その人々の間でのコンセンサス構築を目指している.プラント災害予防チャレンジでは,環境外乱のある模擬プラントでの実施,トンネル事故災害対応・復旧チャレンジにおいては,シミュレータにより実機では実現困難な環境での競技の実施,災害対応標準性能評価チャレンジ(STM)においては,実問題をより指向した標準タスクを含んだ課題の実施を本大会で計画している.1-d)ジュニアカテゴリーでは,人間とロボットが共生し協働する未来に貢献できる若い世代の育成を目指して,スクールロボットチャレンジとホームロボットチャレンジを計画している.ホームロボットチャレンジでは,2018年に実施されたホームロボットチャレンジミニサイズに加え,新たにホームロボットチャレンジリアルサイズが設定された.
また,2)展示会(WRE)に関しては,企業•大学•研究機関等による出展•展示や地域でのロボッ卜の社会実装の先進的な事例の紹介とともに,世界の有識者や関係者による国際フォーラムや協賛企業によるやワークショップを計画中である.
なお,新コロナウイルス感染の世界拡大を受け,3月24日に東京オリンピック・パラリンピック(Tokyo2020)の約一年の延期が決定された.WRSはもともと同イベントに連動して企画された経緯もあり,2021年度への延期が発表された.
〔佐藤 知正 WRS実行委員長,NEDO,東京大学〕
参考文献
(1)World Robot Summit,http://worldrobotsummit.org/
(2)日本ロボット学会誌Vol.37,No.3,“特集:World Robot Summit2018”,Apr.2019
(3)ロボット新戦略,http://www.kantei.go.jp/jp/singi/robot/pdf/senryaku.pdf
(参照日2020年4月7日)
17.3 産業分野
本節では,ものづくり分野に加えて各種産業分野におけるロボティクス・メカトロニクスの応用製品や技術の動向について紹介する.
17.3.1 市況
2019年は産業用ロボット市場はおおむね活況であった.国際ロボット連盟(IFR:International Federation of Robotics)(1)の2019年9月18日のプレスリリースによれば,2018年の世界の年間販売額は165億ドルで過去最高を記録,2018年の世界出荷台数は422,000台で前年比6%増となった.IFRは2019年の出荷台数は2018年の記録的な水準から後退すると予測しているが,2020年から2022年までは年平均12%の成長を見込んでいる.アジアは依然として世界最大の産業用ロボット市場で,2018年にはアジア全体では1%の増加,内訳は中国と韓国の設置台数が減少,日本は大幅に増加した.2番手市場の欧州ではロボット設置台数が14%増加し6年連続で記録を更新した.米国では前年比20%増となり6年連続で過去最高を更新したとされる.
17.3.2 トピック
読者の関心は,新型コロナウィルスSARS-Cov-2による感染症COVID-19のパンデミックの影響がどうなるかであろう.マスコミ報道では2020年4月頃からの企業倒産等が喧伝されているが実は2019年末からの減速は始まっていた(2).パンデミックによる緊急事態体制の影響は,まず飲食や宿泊業などエンドユーザへのサービス業に出ていて,本格的には夏以降に大きな影響が出る可能性がある.
しかしながら,ポストCOVID-19禍の経済の盛衰の鍵を握るのは,本稿が対象とする自動化システムであることは間違いない.および,自動化システムの普及により働き方改革も否応なく進む.
17.3.3 技術動向
継続的にIoTの利活用,深層学習に代表されるAIの応用について事例が増加している.いわゆるキラーアプリが登場すること無く静かに着実に広がっていく気配となっている.モバイルネットワークの5Gも登場し,今後どのように広がっていくのかが楽しみである.
協働ロボットについては,2017年から2018年を比較して売上高が57%増加し,5億6690万ドルとなったとされる(3).この57%増加と,5.7億ドル/165億ドル≒3.4%をどう見るかである.文献(3)をはじめいくつかのレポートは可搬質量(10Kg未満),分野(運輸分野),アプリケーション(マテハン・組立・ピック&プレース)を特記して市場が伸長すると述べている.つまりは適材適所,そういうことである.もちろん協働ロボットの源となったEUのSMErobotプロジェクトで研究された直感的プログラミングインタフェース,安全対策,それらを支える要素技術については,産業用ロボット全般に波及していて,この破壊的(とまでは現時点では言えないにしても確実に新分野を切り拓いた)イノベーションには,素直に先見の明を感じざるを得ない.
17.3.4 研究動向
学術サイドでは,このところロボットシステムの性能・機能を比較するため,ベンチマーク,あるいはメトリックと呼ばれる評価指標の創出が世界的に話題になっていて,それは進行中である.ただし,今後,何を測るべきかは,ポストCOVID-19禍で,おそらく変わる.それは次節で述べる.
17.3.5 各国国策動向
昨年度の本報告では各国国策に触れた.今年度に述べるべきは,冒頭で述べたポストCOVID-19禍の社会システムの再構築にどう対応すべきかであろう.各国はサプライチェーンの再構築を目指すはずで,そこでは産業用ロボットに代表されるロボティクス・メカトロニクスの応用製品をインテグレーションした自動化システムの新規開発・導入が鍵となる.いかに投資効果をもった合目的で無駄のないシステムを迅速に立ち上げられるかの,技術開発競争が見込まれている.
実は本年鑑17.2 World Robot Summitの状況にも記載のあるものづくりカテゴリーでは,すでにそのような技術開発を啓発する理念のもとで競技ルール策定と運営が行われている.
17.3.6 まとめ
以上をまとめると,2019年は産業用ロボットビジネスの曲がり角があり,曲がってみると新型コロナウィルスが待ち構えていた,と例えられる.昨年の本稿で予想した「2018年が産業用ロボット新元年と呼ばれる可能性」は無くなり,期待される変曲点は2020年以降になる.しかも「過酷な高速グローバル競争」が続くのではなく,競争の中で真の破壊的なイノベーションの登場が予想される.そのなかで日本がこれらの流れをリードできるかどうか,ロボット技術者・研究者は傍観している暇はない.
かつてペスト禍で休校になってしまい帰省したニュートン先生は,その18ヶ月間において,いわゆる3大業績(微積分学の基礎,プリズムの分光実験,万有引力の法則)を成したと伝わる.我々はどうか?まさに今,巨人の肩の上に立ち,自らの未来を創るときであろう.
〔野田 哲男 大阪工業大学〕
参考文献
(1)国際ロボット連盟 https://ifr.org/ (参照日2020年06月07日)
(2)帝国データバンク 全国企業倒産集計2019年度 https://www.tdb.co.jp/tosan/syukei/19nen.html (参照日2020年06月07日)
(3)0The Collaborative Robot Market – 2019,Interact Analysis社 https://www.interactanalysis.com/the-collaborative-robot-market-2019-infographic/ (参照日2020年06月07日)
17.4 オープンソースソフトウェア・ミドルウエア
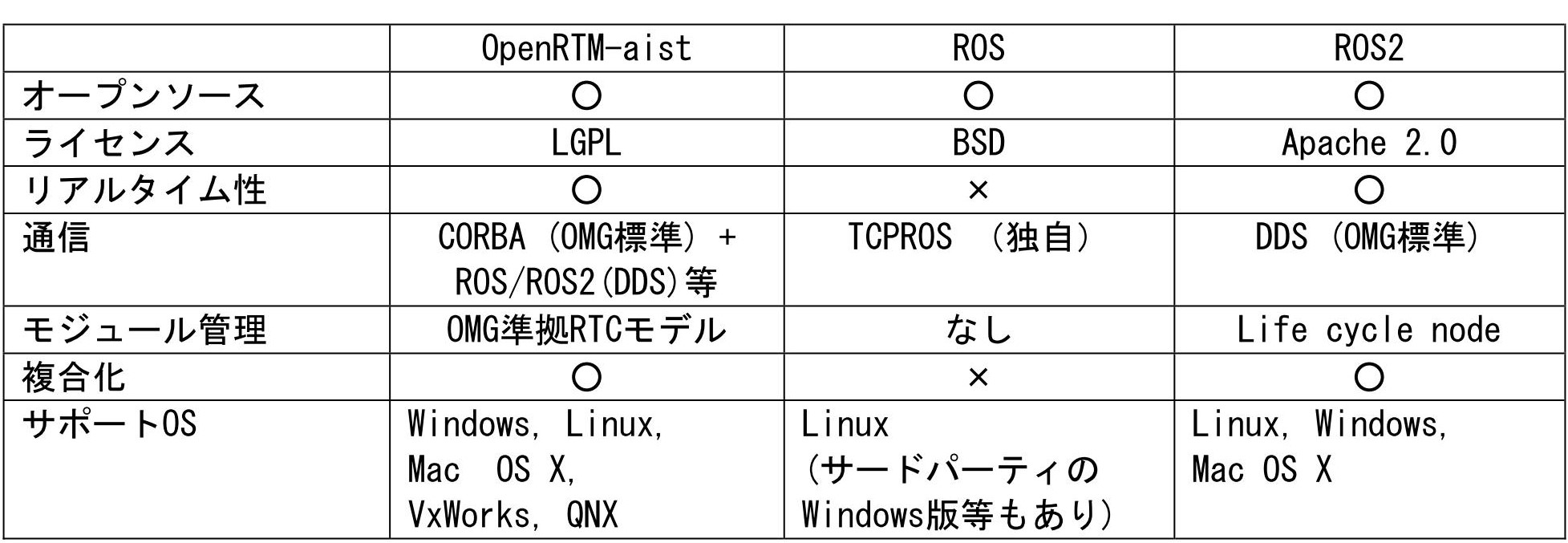
ロボットミドルウェアは,ロボットシステムの構築を効率化するためのソフトウェア基盤であり,コンポーネント化フレームワーク,ツール,ライブラリなどから構成される.ミドルウェアを利用することで,ソフトウェアのモジュール化・再利用や組み換え,リアルタイム実行やネットワーク通信等が容易に実装でき,開発効率が飛躍的に向上する.主なロボットミドルウェアとしてRTミドルウェア,ROS,OPRoS,OROCOS等が知られている(1)が,ここでは,RTミドルウェア,ROSおよびROSの新しいバージョンであるROS2について最近の動向を概説する(表 1).
RTミドルウェア: OpenRTM-aistは主に産業技術総合研究所が開発するロボットミドルウェアである(2).OMG(3)標準に準拠したインターフェース,Execution Contextと呼ばれる実行機構によるリアルタイム実行・複合化機能,グラフィカル開発環境,多数のOS(VxWorks等リアルタイムOSも含む),複数の言語(C++, Java, Python, 第サードパーティのLua, C#版も有り),複数のプロトコル(CORBA,ROS,ROS2やMQTT等,2.0版の機能)が利用できる等の特長がある.
ROSは2007年から米国のベンチャー企業 Willow Garageにより開発されたミドルウェアである(4).同社の解散後,その開発はOpen Source Robotics Foundation (OSRF),Open Roboticsへと引き継がれ,現在はコミュニティととともにROSおよび後述のROS2の開発が継続されている.ROSは,UNIX文化に根差した開発・操作法を採用,ロボットシステムを可視化するrvizをはじめとする多くの便利なツール群に加えて,移動ロボット用パッケージ Navigation Stack や,アーム用パッケージ MoveIt! をはじめとする膨大なパッケージが利用可能であることから多くのユーザを集め,デファクトスタンダードとなっている.
一方で,ROSに不足していたリアルタイム実行・コンポーネント複合化機能の追加や,Linux以外のOSサポートの改善のため,2014年ごろから新バージョンROS2の開発が開始された.OMG標準通信ミドルウェアDDS (Data Distribution Service) を採用したためROSとの直接の互換性はないが,サポートOSの追加(Windows,Mac OS X等),組込み向けの構造,リアルタイム実行・複合化に適したライフサイクルノードの導入,実行をより柔軟に行うExecutorの導入等が行わた.また,製品での利用を見据えてセキュリティ機能(5)や品質向上の取り組みも行われている.現状ではROS2への移行も進みつつあるもののROSのユーザも依然として多く,両者が併存する形で開発が進められている.
表1 RTミドルウェア,ROS,ROS2の比較
〔安藤 慶昭 (国研)産業技術総合研究所〕
参考文献
(1)Gergely Magyar, Peter Sincak, Zoltán Krizsán, “Comparison Study of Robotic Middleware for Robotic Applications”, Advances in Intelligent Systems and Computing, DOI: 10.1007/978-3-319-10783-7_13.
(2)OpenRTM-aist Official Website: https://openrtm.org (参照日 2020年4月1日)
(3)OMG Object Management Group: https://www.omg.org (参照日 2020年4月1日)
(4)ROS: https://www.ros.org/, http://wiki.ros.org/ (参照日 2020年4月1日)
(5)ROS 2 DDS-Security integration: https://design.ros2.org/articles/ros2_dds_security.html (参照日 2020年4月1日)
17.5 AI/深層学習の注目技術
現在のAI(人工知能)の中心技術である深層学習は,”ほぼ同様の枠組みで画像,音声,言語など多様なモダリティを扱える”という特長を持つ.ロボットなどの実世界で行動するシステムは多様なセンサ,アクチュエータなどを備えたシステムであり深層学習応用が期待されている.
例えば,ロボットビジョンは深層学習が最初に導入された応用分野である.R. Josephらは画像の色と深さ情報から構成される三次元RGB-D画像から,深層学習モデルの一種であるConvolutional Neural Network (CNN)を利用し把持位置を予測している(1).しかし実際の動作自身は,逆運動学などの従来のロボット制御で実行されることを前提としている.
これに対して,入力(画像や映像)から,必要な出力(動作出力)直接を得られる深層学習モデルを利用するEnd-to-Endのアプローチもある.S. Levineらは,深層強化学習の枠組みを用い,14台のロボットアームに80万回のピッキング動作をさせ多様な一般物体のハンドリングを実現している(2).強化学習は試行錯誤的な学習であるため膨大な学習時間が必要となる.この問題を解決するためにシミュレータの学習を現実に転用する”Sim2Real”の研究も多く報告されている.しかし現在のシミュレータでは,ロボットにおいて重要となる,接触,変形,摩擦など複雑な非線型物理現象を再現しきれない.
これに対して入力情報(感覚,運動,報酬)を全て予測する,という予測学習のアプローチがある.K. Nodaらは,この予測学習によるロボット動作学習の枠組みを示した(3).人間の動作データを再生できる(模倣)ように,深層学習モデルを学習する.P. Yangらはこれを繰り返しタオル畳み動作に拡張した(4).
今後の深層学習のロボット応用で重要になると考えられるのが力触覚情報の学習である.例えば,M. A. Leeらはトルクセンサの情報を深層強化学習することでペグイン動作の学習を実現した(5).触覚への応用に関しては,K. Takahashiらが,3軸の多点触覚センサによる物体表面の認識において,能動知覚と深層学習を用いた手法を提案している(6).
深層学習のロボット対話への応用も多くある.対話のみであれば,スマートスピーカーと機能的にはほぼ等価だが,実世界における協働行為のためには,言語が持つ多義性の問題を扱う必要が出てくる.T. Yamadaらは RNNを用いた運動と言語の統合モデルを提案し,言語から運動だけでなく,提示された運動を言語で説明するモデルを実現している(7).J. Hatoriらは,人間からの音声指示によって実世界の複数物体から選択,ピッキングを行うシステムを画像,音声などの複数の深層学習モデルを組合わせることで実現している(8).
〔尾形 哲也 早稲田大学,(国研)産業技術総合研究所〕
参考文献
(1)R. Joseph, and A. Angelova: Real-Time Grasp Detection Using Convolutional Neural Networks, IEEE International Conference on Robotics and Automation 2015.
(2)S. Levine, P. Pastor, A. Krizhevsky, D. Quillen: Learning Hand-Eye Coordination for Robotic Grasping with Deep Learning and Large-Scale Data Collection, arXiv:1603.02199v4, 2016.
(3)K. Noda, H. Arie, Y. Suga, and T. Ogata: Multimodal integration learning of robot behavior using neural networks, Robotics and Autonomous Systems, vol. 62, issue 6, pp. 721-736, 2014.
(4)P. Yang, K. Sasaki, K. Suzuki, K. Kase, S. Sugano, and T. Ogata: Repeatable Folding Task by Humanoid Robot Worker using Deep Learning, IEEE Robotics and Automation Letters (RA-L), Vol.2, No.2, pp. 397-403, Nov. 2016.
(5)M. A. Lee, Y. Zhu, K. Srinivasan, P. Shah, S. Savarese, L. Fei-Fei, Animesh Garg, Jeannette Bohg: Making Sense of Vision and Touch: Self-Supervised Learning of Multimodal Representations for Contact-Rich Tasks, Proc. of IEEE International Conference on Robotics and Automation (ICRA2019), pp. 8943-8950, 2019.
(6)K. Takahashi, J. Tan: Deep Visuo-Tactile Learning: Estimation of Tactile Properties from Images, Proc. of IEEE International Conference on Robotics and Automation (ICRA2019), 2019.
(7)T. Yamada, S. Murata, H. Arie, and T. Ogata: Dynamical Integration of Language and Behavior in a Recurrent Neural Network for Human–Robot Interaction, Frontiers in Neurorobotics, 15 July 2016.
(8)J. Hatori, Y. Kikuchi, S. Kobayashi, K. Takahashi, Y. Tsuboi, Y. Unno, W. Ko, J. Tan: Interactively picking real-world objects with unconstrained spoken language instructions, Proc. of IEEE International Conference on Robotics and Automation (ICRA2018), pp. 3774-3781, 2018.
17.6 宇宙ロボット分野の注目技術
17.6.1 小惑星探査のためのロボット技術
2014年12月3日に打ち上げられた日本の小惑星探査機「はやぶさ2」は,2018年6月27日に小惑星リュウグウに到着し,2019年11月13日にリュウグウを出発するまでの約1年半,小惑星の観測,表面探査ローバの展開,サンプル採取,人工クレータの生成などの探査活動を成功裏に実施した(1).
2018年9月21日には,探査ローバ「ミネルバII-1」のRover-1AとRover-1Bが分離され,世界で初めての小惑星表面探査ロボットとしてリュウグウに着地し,場所を変えながらさまざまな画像の地球伝送に成功した.また,2018年10月3日にドイツDLRとフランスCNESが開発した「MASCOT」も分離され,リュウグウの表面探査を行った.「ミネルバII-1」Rover-1A, 1Bはともに直径17cm,高さ7cmの円筒形をしており,質量はそれぞれ1.15kg, 1.13kgの超小型探査ロボット(2)である.内部に「はずみ車」をもっており,その反動で小惑星表面をホッピング移動し,搭載された複数のカメラにより様々な画像の撮影に成功した.一方「MASCOT」は,大きさ8cm×29cm×21cm, 質量約10kgで,赤外分光顕微鏡などの4種類の観測装置を搭載していた(3).「ミネルバII-1」同様に慣性反動によるホッピング移動も行った.これらの分離着陸型の小型ロボットにより,リュウグウ表面の詳細な科学データを得ることができた(4).
その後,「はやぶさ2」探査機は,2019年2月22日に1回目のタッチダウン・サンプリングを行い,2019年4月5日にはインパクタにより約10mの人工クレータの生成に成功した.さらに2019年7月11日には2回目のタッチダウンを行い,インパクタによって内部物質が露出したエリアからのサンプル採取を行った.これらのタッチダウン運用においては,高精度のピンポイント着地を行うための自律誘導制御が行われた.リュウグウ到着後の詳細な観測の結果,その表面には予想以上に多くの岩塊があることが分かり,これらを避けて安全なタッチダウン運用を行うためには,初号機をはるかに超える高精度の誘導制御が必要であった.タッチダウンの際,「はやぶさ2」と地球間は約3億km離れており,電波での往復に30分以上の時間がかかるため,最終フェーズでは自律誘導が不可欠である.小惑星表面からの高度45mまでは,地上支援も併用した画像航法を行い,それ以下の高度では,ターゲットマーカの画像トラッキング,LIDER(レーザー高度計)およびLRF(レーザーレンジファインダ)を併用した完全自律制御が行われた.結果として,1回目のタッチダウンでは目標地点に対して誤差1m,2回目のタッチダウンでは0.6mという驚異的な精度が達成された(1).
また,2019年10月3日には,大学コンソーシアムで開発された「ミネルバII-2」Rover-2が,高度約1kmにて切り離されリュウグウを周回する運用が行われた.Rover-2は,Rover-1A, 1Bと同様に表面を移動探査する目的で開発されたが,途中で不具合が発見されたため計画を変更して周回ミッションを行うこととなった.周回中の軌道は「はやぶさ2」搭載カメラおよび無線信号によりトラッキングされた.約1.25周したのちRover-2はリュウグウ表面に着地したことが確認され,これらのデータがリュウグウの重力場モデルの検証に役立てられることが期待されている.
一方,2018年12月に小惑星ベンヌに到着した米国NASAのOSIRIS-REx探査機は,1年以上にわたる上空からの観測に基づきタッチダウン・サンプリングの候補点を決定し,2020年4月には高度65mまで降下するリハーサルが行われた.実際のサンプリングは2020年秋頃に行われ,2021年3月には小惑星を離れ地球へ帰還する計画である(5).
17.6.2 月・火星探査ローバー
2019年1月3日に嫦娥4号によって,月の裏側にあるエイトケン盆地フォン・カルマン・クレーターに着陸した中国の6輪型ローバーである玉兎2号 (Yutu-2) は,順調に探査ミッションを行っている.これまで,月面上を移動探査した無人ローバーの最長活動期間は,1970年のソビエト連邦のLunokhod 1によって321日間という記録が残されているが,2019年12月にはYutu-2はこれを超えて活動を継続している(6).Yutu-2の走行距離は350m程であるが,レーダー波を用いて月の地下土壌の分析を行い,走行経路に沿った断層画像が作成されている(7).
米国NASAの火星探査ローバーについては,2004年2月に探査活動を開始したMars Exploration Roverプログラムの「オポチュニティ」が,発電電力低下のため2019年2月13日(米国時間)に約15年に渡る探査ミッションを終了した(8).総走行距離は45.16kmであり,これは地球外を探査したローバーとして最長記録である.2012年8月に探査活動を開始したMars Science Laboratoryプログラムの「キュリオシティ」は2020年4月15日現在で走行距離が約22kmに達している(9).火星表面を移動しながら,興味深い岩石に対してロボットアーム先端のドリルを用いて穴をあけ,顕微鏡撮影やスペクトル分析により組成を明らかにするなどの科学探査が行われている(10).
〔吉田 和哉 東北大学〕
参考文献
(1)Yuichi Tsuda, Takanao Saiki, Fuyuto Terui, Satoru Nakazawa, Makoto Yoshikawa, Sei-ichiro Watanabe, Hayabusa2 Project Team, Hayabusa2 mission status: Landing, roving and cratering on asteroid Ryugu, Acta Astronautica, Vol. 171, (2020), pp.42-54. DOI: 10.1016/j.actaastro.2020.02.035
(2)T. Yoshimitsu, T. Kubota, A. Tomiki, M. Otsuki, K. Yoshikawa, Readiness of Proximity Operation on Minerva-II Rovers Onboard Hayabusa2 Asteroid Explorer, Proc. i-SAIRAS 2018, 4-6 June, Madrid, Spain, (2018)
(3)Tra-Mi Ho, et. al., MASCOT—The Mobile Asteroid Surface Scout Onboard the Hayabusa2 Mission, Space Science Review Vol. 208 (2017), pp.339-374. DOI 10.1007/s11214-016-0251-6
(4)R. Jaumann, et al., Images from the surface of asteroid Ryugu show rocks similar to carbonaceous chondrite meteorites, Science, Vol. 365, Issue 6455 (2019) pp.817-820. DOI: 10.1126/science.aaw8627
(5)OSIRIS-Rex, NASA
https://www.nasa.gov/osiris-rex (参照日2020年4月19日)
(6)Yutu 2 is now longest working rover on moon, China Daily 2019-12-13
https://www.chinadaily.com.cn/a/201912/13/WS5df2e464a310cf3e3557dd69.html(参照日2020年4月19日)
(7)Chunlai Li, et. al., The Moon’s farside shallow subsurface structure unveiled by Chang’E-4 Lunar Penetrating Radar, Science Advances, Vol. 6, no. 9, (2020), DOI: 10.1126/sciadv.aay6898
(8)Mars Exploration Rovers, NASA
https://mars.nasa.gov/mer/(参照日2020年4月19日)
(9)Mars Curiosity Rover, NASA
https://mars.nasa.gov/msl/home/(参照日2020年4月19日)
(10)小野雅裕, 火星ローバの運用に関する最近のトピック, 日本ロボット学会誌 vol.32, no.5 (2014), pp.435-438.
17.7 サービス分野でのロボット動向
国際ロボット連盟(IFR)によると2018年度に販売された業務用サービスロボットは対前年比で約60%増の27万台と急激な伸びを示している.この背景は,ロボティクス・メカトロニクス関係の技術の成熟に加えて,人手不足に拍車がかかっていることが挙げられる.特に,物流現場はロボット活用が最も進んでおり,これまでのAGVや無軌道台車といった搬送系だけではなく,物体認識,異形物ハンドリングなどのマニピュレーション系の技術が発達してきたことにより,MUJIN社がユニクロなどを手掛けるファーストリテーリング社との倉庫内自動化に向けた連携を発表したようにマテリアルハンドリングの現場で実際に活用されるようになってきている.
物流現場以外においても移動系ロボットは,病院・介護施設,商業施設,レストランなどの屋内施設を中心として,モノの搬送(Doog社など),掃除(ソフトバンク社など),警備(セコム社など)など様々なアプリケーションでの実活用が国内でも進み始めた.ただし,中国を始めとした海外勢も完成度の高い自律移動ロボットを低価格で大量に投入し始めており,自律移動ロボットの競争はコスト面含めて激化していくことが予想される.今後は,技術的には歩道などの屋外環境での安全かつ信頼性の高い走行技術の開発,産業的には移動ロボットを管理する運行管理システムや更に上位の基幹システム(製造におけるManufacturing Execution System:MESや物流におけるWarehouse Management System:WMSなど)との連携,エレベータなどインフラとの連携などシステムインテグレーションの重要性が増していく.
一方,2019年はサービス分野の中でも未活用領域とされていた新しい業界での活用が本格化し始めてもいる.例えば,農業分野ではinaho社がアスパラガスなどの収穫ロボットを商用化し,収穫量に応じた課金システムを導入するなど,RaaS(ラース:Robotic as a Serive)ビジネスとしても注目を集めている.また,食品・飲食分野においては,コネクティッドロボティクス社がJRの駅構内の蕎麦屋で調理を行う取組みを始めたほか,バックヤードでの洗い物,ホールでの下げ膳など多くの業務で自動化の検討が行われている.更に,建築業界においては,業界全体の生産性向上に向けた会社を超えた連携も始まっており,2020年2月には鹿島と竹中工務店は施工自動化に向けた取組みを共同で実施するとしている.
また,2020年が始まってからは,中国武漢を起点として世界中に広まった新型コロナウイルス対応として,ロボットへの期待・必要性が急激に高まっており,搬送,消毒などの自動化に加えて,遠隔操縦型ロボット(テレプレゼンス,マスタースレーブ型も含む)の開発・社会実装が急ピッチで進められており,2020年は後にアバター元年と呼ばれる年になるであろう.遠隔操縦型のロボットは,ANA,オリィ研究所,MELTINなどが開発を進めており,5G,AI,ハプティクスなどの関連技術とも相乗効果を出しながら,活用が進んでいっている.
〔安藤 健 パナソニック(株)〕
17.8 ロボット関連プロジェクトの動向
2020年はロボット関係の政府系プロジェクトについて方向転換がみられる年となった.2020年に終了するプロジェクトまでは,ロボットそのものやロボットの要素技術に興味をもつロボットを主体とした研究開発事業が多く見られた.しかし,その後は,応用領域においてロボットを手段として活用する内容に移行する傾向がみられる.特に,人工知能分野やサーバーフィジカルシステム分野において,物理世界にアクセスする手段としてロボット技術を活用する考え方への流れがみられる.
まず,2019年3月にはインフラ施設用や災害対応のためのロボットを開発する3件のプロジェクトが,終了した.特定用途のための特徴的なロボット技術を開発する事業であった.
・新エネルギー・産業技術総合開発機構(NEDO)「インフラ維持管理・更新等の社会課題対応システム開発プロジェクト」(1)
・戦略イノベーション創造プログラム(SIP)「インフラ維持管理・更新マネジメント技術」(2)
・革新的研究開発推進プログラム(ImPACT)「タフ・ロボティクス・チャレンジ」(3)
また,2020年3月には以下の3件のプロジェクトが終了した.これらは,ロボット自体の機能開発を目的とするものであったり,具体的に設定した現場で役に立つ「ロボット」を開発するものであった
・NEDO「ロボット活用型市場化適用技術開発プロジェクト」(4)はものづくり分野およびサービス分野へのロボット導入の促進のために,ロボットの新規技術を開発する事業であった.
・NEDO「次世代人工知能・ロボット中核技術開発」(5)のうち「革新的ロボット要素技術分野」では,センシング,アクチュエータ,インテグレーション分野でのロボット要素技術を開発した.
・科学技術振興機構(JST)ERATO「石黒共生ヒューマンロボットインタラクションプロジェクト」(6)は,社会性を持つ自律型ロボットの実現を目標に,共生ヒューマンロボットインタラクションを研究した.
一方,現在継続中のプロジェクトでは,ロボットは人工知能技術分野やサイバー空間技術の文脈で実空間にアクセスする機能手段としての位置付けになっていることが特徴的である.
・NEDO「次世代人工知能・ロボットの中核となるインテグレート技術開発」(7)は,土木建築分野や生産支援分野等において対象システムの要素としてロボットが活用されている.
・NEDO「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」(8)は,いわばロボット化したドローンによる運航管理や衝突回避技術について開発をしている.
・NEDO「人工知能技術適用によるスマート社会の実現(PRISM)」(9)は人工知能技術の社会実装を推進する研究開発をしているが,センサやインタラクション分野等でロボット技術に期待している.
・SIP第2期「ビッグデータ・AIを活用したサイバー空間基盤技術」(10)はサイバー・フィジカル・システムの社会実装に向けて技術開発をしており,その実現手段としてロボットの活用を考えている.
・SIP第2期「フィジカル空間デジタルデータ処理基盤」(11)では,柔軟なエンドエフェクタやセンシングのためのアクチュエーション技術等においてロボット技術の展開や活用が期待されている.
・JST ERATO「稲見自在化身体プロジェクト」(12)は,自在化身体を実現する目的のためロボット技術は重要要素として用いられ,必要な技術開発がされるものと思われる.
・科研費新学術領域「ソフトロボット学」(13)は「やわらかさ」を目指して大きな学術の潮流を創りだすもので,ロボットの新しい可能性を広げる分野と思われる.
・科研費新学術領域「対話知能学」(14)は,近未来の家電製品やロボットが自律的に活動する世界を想定し,ロボットの行動決定や意図,社会規範等の研究が想定されている.
2020年度から開始するNEDOの3プロジェクトは,特定領域の基盤の構築を目指す内容となっている.
・NEDO「革新的ロボット研究開発基盤構築事業」(15)(2020-2024)は,産業用ロボットなどを想定した「ハンドリング関連技術」,「遠隔制御技術」等の要素技術について開発支援する.
・NEDO「規制の精緻化に向けたデジタル技術の開発事業」(16)(2019~2020)には,「ドローン等を活用した建築物の外壁の定期調査に係る技術開発」が含まれる.
・NEDO「安全安心なドローン基盤技術開発」(17)(2020年度)では,政府調達向けドローンを想定した標準機体設計・開発及びフライトコントローラー標準基盤設計・開発を実施する.
その他の関連事業として,2020年には「World Robot Summit」(18)(総称:WRS)が実施される.生活,社会,産業分野でロボットの技術やアイディアを競う競技会と展示会が開催される.
「ムーンショット型研究開発制度」(19)の中には,(目標1)多数の遠隔操作ロボットにより大規模・複雑なタスクを実行する技術と(目標3)人が違和感を持たないAI ロボットの開発が含まれる.
その他,経済産業省では,ロボットフレンドリーな環境の実現に向け,メーカーやSIer等が協働してロボット導入に向けた課題解決のための研究開発等が実施される.
このように最近の研究開発プロジェクトは,ロボットを主体とした研究開発思想から,ロボットを活用して情報世界と物理世界の融合させ,豊かな社会を実現する開発思想への流れがみられる.全体としてロボットそのものを対象とするプロジェクトは縮小傾向にあるものの,ロボット技術を活用し様々な領域を自在化する場面は広がるであろう.このような中,ロボット関連の研究力を維持し,人材育成を継続する努力が必要とされている.
〔安川 裕介 新エネルギー・産業技術総合開発機構(NEDO)〕
参考文献
(1) https://www.nedo.go.jp/activities/ZZJP_100081.html
(2) https://www.jst.go.jp/sip/k07.html
(3)https://www.jst.go.jp/impact/program/07.html
(4) https://www.nedo.go.jp/activities/ZZJP_100107.html
(5) https://www.nedo.go.jp/activities/ZZJP_100106.html
(6) https://www.jst.go.jp/erato/ishiguro/index.html
(7) https://www.nedo.go.jp/activities/ZZJP_100138.html
(8) https://www.nedo.go.jp/activities/ZZJP2_100080.html
(9) https://www.nedo.go.jp/activities/ZZJP_100137.html
(10) https://www.nedo.go.jp/activities/ZZJP_100158.html
(11) https://www.nedo.go.jp/activities/ZZJP_100147.html
(12) https://www.jst.go.jp/erato/research_area/ongoing/17943235.html
(13) http://softrobot.jp/
(14) https://www.commu-ai.org/
(15) https://www.meti.go.jp/main/yosangaisan/fy2020/pr/ip/sangi_11.pdf
(16) https://www.nedo.go.jp/koubo/CD2_100202.html
(17) https://www.nedo.go.jp/koubo/CD2_100197.html
(18) https://worldrobotsummit.org/
(19)https://www8.cao.go.jp/cstp/moonshot/index.html
(参照日2020年4月5日)
17.9 注目技術動向
ロボティクス・メカトロニクス分野における最新の注目技術として,本部門主催のロボティクス・メカトロニクス講演会2019(2019年6月,広島)から選ばれ,本部門ROBOMECH表彰を受賞した研究6件について簡単に紹介する.
1件目は「微小凹凸のなぞり触感を増幅させるスパイラルコイル」(竹囲,他)である.人の五感で最も置き換えにくいとされる触覚において,スパイラルコイルの上から指先にひずみゲージを取り付けてなぞることで計測対象表面の凹凸を拡大させる効果があることを定量的に明らかにした.
2件目は「小型・低摩擦アクチュエータMagLinkage の開発とハンド応用」(小山,他)である.小型ダイレクトドライブモータと磁石歯車と低減速比遊星減速機を用いたMagLinkageによりモータ直結エンコーダのみでバネとダンパが直列連結した衝撃吸収制御を実現し,指機構で転がってきた円柱をはじき返すことなくキャッチすることに成功した.
3件目は「介護施設における 2 次元姿勢推定を用いた行動識別と言語化」(高野,他)である.人間の行動記録をカメラから得られる姿勢特徴ベクトル集合と行動運動の言語表現集合の学習から,介護施設の高齢者の動きの記録を無人で言語記録化することに70%の割合で成功した.
4件目は「1 次元柔剛切替メカニズムを活用した耐火性トーラスグリッパ機構」(清水,他)である.ワイヤを通して数珠状に連結した機構を複数有するトーラスグリッパ機構で把持対象物に形状を倣わせる耐火性と対切創性を備えたグリッパを開発した.
5件目は「3D プリンタを用いた分布型接触センサの開発と事象駆動型 6 脚移動ロボットの反射制御」(藤井,他)である.銀と樹脂を一体で成型できる3Dプリンタを用いて脛全体で接触を検出する脚を試作し,接地点追従法に段差に接触した際の反射動作を追加して6脚ロボットに段差乗り越えの成功率を向上させた.
6件目は「多自由度災害対応ロボットの環境適応性に関する研究~実空間での能動的情報探索と仮想空間での高効率動作探索~」(亀﨑,他)である.4腕と6クローラを有する災害対応ロボット「オクトパス」に対して,実空間での滑り易さ・未知微小変形を含めた多様な移動環境に適応するために仮想空間上で遺伝アルゴリズムを用いた探索を行い,最適動作を生成することで不整地踏破可能性を向上する研究を行った.
以上の6件は学術研究分野での表彰であった.2018年から新設された産業・実用分野の表彰に関して,2019年は残念ながら「該当なし」であった.Robomech2019では,マツダ株式会社技術研究所技監でもある広島大学感性イノベーション研究推進機構の農沢隆秀機構長による「脳科学に基づく感性イノベーションとモノづくり~感性・知覚の可視化とその社会実装~」という特別講演があり,先端科学と産業分野の融合が大きな成果を期待させるものであっただけに残念である,企業研究は早期の実用化を目指すためオリジナリティよりもすでに確立された手法がどこまで工場の実工程に適用可能かといったところに興味が向いたものが多く,その点では表彰審査員の目に留まらなかったのかもしれない.実用化研究の目利きを含めて,今後の取り組みが望まれる.
〔小谷内 範穗 近畿大学〕