
技術のみちのりー日本機械学会賞受賞技術の開発物語ー
ドライバー心理を読み解き、世界トップの安全性を目指せ! トヨタ自動車(株)
2018年度学会賞(技術)
「アクティブ操舵制御による衝突回避支援システムの開発」トヨタ自動車(株)
システムとドライバー判断の不一致を克服せよ
トヨタ自動車(株)は、危険性を判断して、自動で操舵制御を行い、衝突を回避する技術「アクティブ操舵回避支援システム」を世界で初めて開発した(図1)。このブレイクスルーはどのように成し遂げられたのだろうか。
実際の交通事故を分析すると、ドライバーの認知ミスによる事故が7割以上を占めている。トヨタでは、2003年に車の衝突回避や衝突被害低減を実現するプリクラッシュセーフティシステム(PCS)を世界で初めて製品化し、改良を重ねてきた。PCSは前方の車や歩行者をカメラとミリ波レーダで検出し、衝突の可能性があるとシステムが判断した場合は、ブザーと表示でドライバーに注意喚起し、さらに衝突の可能性が高まると自動でブレーキを作動させるというシステムだ。
しかし、PCSの性能アップを進める過程で、ドライバーへの干渉という問題が浮上した。車速が高い場合は、より手前からブレーキをかければ回避できるが、ドライバーが「まだ安全」と感じている段階でブレーキがかかると、システムを煩わしく感じてしまう。ドライバーに不快感を与えないためには、衝突の危険を感じるギリギリまで待って、ブレーキを作動するしかないのだが、そうすると間に合わなくなる。
そこで思いついたのが、ブレーキに加えて操舵も使うというアイデアだ。人は、ブレーキが間に合わない時、ステアリングを切って回避する。実車でドライバーの行動を分析すると、車速の高い領域ではブレーキにステアリング操作を併用することで、事故低減効果が期待できることがわかった。
こうして自動操舵制御の先行検討を開始することになり、ドライバーが危険を感じてから衝突までの時間を調査して、不快感を与えずに操舵の支援効果が出るタイミングなどを研究してきた。そして2015年、実用化を目指して開発が始まったのだ。

図1 「アクティブ操舵回避支援システム」を搭載したレクサス 新型LS
2次衝突の課題
システム開発担当の八十嶋は、長年PCS開発に携わってきた。今回の担当は、ブレーキのみの従来システムと操舵を加える新システムとの連携だ。開発メンバーに従来PCSの性能や品質に対する考え方を伝え、最終的な品質担保をどのような目線で行うべきか、回避性能の向上を狙いすぎて、逆に不要作動を起こすことなどないか、メンバーと何度も議論した。
しかし、操舵という横方向の動きが加わることで、歩行者や車から回避した後に、対向車など他の対象物と衝突する恐れが出てくる。そこで、どのようなケースで2次衝突が起こるのかを机上で徹底検討した。また、従来PCSでは前方の衝突対象がいなくなれば、ブレーキは解除されてしまうため、新システムでは、操舵で車が横を向くと、衝突対象がセンサの検知範囲からはずれてしまい、この時点でブレーキが解除されてしまう。操舵を加えた場合、ブレーキを作動し続けるべきではないか、といった話し合いを重ねた。
こうして開発目標である「アクティブ操舵回避支援システム」のコンセプトが出来上がった。システムが、ブレーキだけでは難しいが操舵制御によって衝突を回避できると判断した場合に、警報とブレーキ制御に加えて操舵が自動で作動するのだ(図2)。そして、少しでも2次衝突の危険性があれば、ブレーキのみで支援を行うことに決定した。
実現のためには、ステレオカメラによる画像認識と回避経路の生成が技術の要となる。後者は、ブレーキ制御を作動しながら、歩行者などを回避するための操舵を行った後、切り戻し操舵制御を行い、自車線から車をはみ出させない(図3)という技術だ。
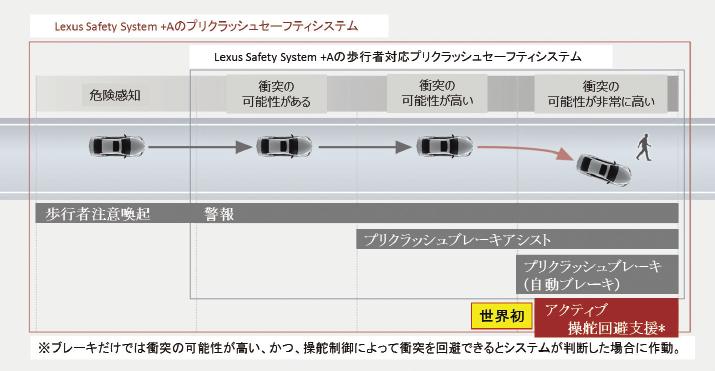 図2 本システムの概要
図2 本システムの概要
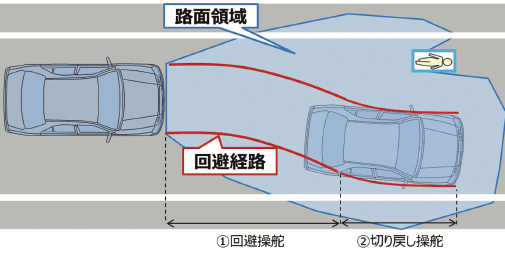
図3 回避経路の生成
認識性能の向上
歩行者や前方の路面を検知して、衝突対象物のない領域(回避スペース)を探索するためには、自車前方の3次元データを高密度にとれるステレオ画像センサが必要だ。そこでセンサ開発担当の内田が、最高品質のセンサを作るべく奔走。リコーインダストリアルソリューションズ(株)と(株)デンソーの共同開発による新型ステレオカメラ(図4)が出来上がった。サプライヤーが難しい要求に真っ向から向き合ってくれた賜物だ。
通常、3次元画像のデータ量は膨大なので、計算に時間がかかり、リアルタイム性に欠ける。そこで、性能を維持しつつソフトウェアの最適化を積み重ね、リアルタイム処理を実現。ステレオ画像から得られる視差分布から、車や歩行者、ガードレールなどの障害物だけでなく、路面の細かい凹凸まで、リアルタイムに正確に検出できるようになった。
 図4 ステレオカメラ(新型LSのフロントガラス上部に搭載)
図4 ステレオカメラ(新型LSのフロントガラス上部に搭載)
操舵制御
この技術は、フルモデルチェンジするレクサスLSへの採用が決まっていた。車にブレーキやステアリングの制御システム、衝突判断を行うコンピュータ、ステレオカメラなどが組み込まれ、最終段階である信頼性確保のための作り込みが始まった。開発期限は数ヶ月後に迫っていた。
ブレーキをかけて急減速しながら操舵を切るという挙動は、シミュレーションでは精度が出にくい。そのため、開発担当の齊木が、実車走行試験を朝から晩まで繰り返し行い、日々完成度を高めていった。
だが、ドライバーに干渉せずに衝突回避を成立させるのは困難を極めた。特にガードレールが設置されているエリアは、高速道路や車速の大きい領域なので、ドライバーはぎりぎりまでブレーキをかけなかったり、ハンドルだけで回避したりすることが多い。この点で、歩行者回避より、ガードレール回避のほうが難しかったという。
理想の安全を求めて
2017年10月に、この技術を搭載した新型LSが発売された(図1)。歩行者に対して、自動ブレーキのみで約60%、操舵制御を併用することで、さらに約16%の事故低減効果が期待できるという。
システム開発の西村は、入社3年目でこの世界初のシステムに携わることになった。デトロイトモーターショーのワールドプレミアで、展示された新型LSを見た時、胸が熱くなったという。「絶対にこのシステムを世に出す」という車両チーフエンジニアの強い思いやたくさんの人の協力を得て、チーム一丸でがんばった成果がそこにあった。
だが、道のりはまだ途中段階だ。「やり直しや失敗を繰り返して得たスキルは、次の開発に生かせる」と開発チームリーダーの村野は、次なるステージに意欲を燃やしている。この技術は、よりロバスト性を高め、将来的に他の車にも搭載するための開発が続いている。事故を起こさない車の実現のために、やるべきことはまだまだある。
(取材・文 山田 ふしぎ)
 受賞者の方々(左から八十嶋さん、齊木さん、西村さん、村野さん、(内田さん授賞式欠席))
受賞者の方々(左から八十嶋さん、齊木さん、西村さん、村野さん、(内田さん授賞式欠席))
キーワード:技術のみちのり
表紙の説明:これは、出力10万kWレヒートガスタービンの高圧圧縮機部分である。1978年から10年間、通商産業省工業技術院のムーンライト計画(省エネルギー技術研究開発)の中で開発されたもので、全長21mある。東京電力袖ケ浦発電所に設置して運転研究の結果、総合熱効率52%を得た。
[日本工業大学工業技術博物館]
表紙写真 北原 一宏