特集 MaaSにより目指す社会とそれを支える次世代モビリティ技術< 電子情報通信学会 合同企画 >
次世代ダイナミックマップ DM2.0(協調型自動運転に向けた情報通信プラットフォーム)
自動運転の安全性向上のため各車両間でデータ共有
車両周辺を検知するセンサを搭載した安全運転支援システムや自動運転に関する研究開発が活発に行われており、レベル3の自動運転の商用化が間近である。通常は車両に搭載されたカメラやレーダといったセンサが利用されるが、見通しの悪い交差点など車載センサのみでは見通せない範囲の危険事象は検知できないという問題がある。一方で、V2X(Vehicle to Everything)通信を利用して車両の情報の収集や配信を行うことで、安全性を向上させる技術が開発されている。具体例として、コネクテッドカー(つながるクルマ(1))の商用サービスであるITS Connectの出会い頭注意喚起というアプリケーションが挙げられる。各車両は車々間通信を利用して車両の位置や速度などの走行情報を周辺の車両に伝えて、衝突などの危険な状況を回避することが目的である。しかし、図1(左)に示すように、前方から接近してきた車両の走行情報を取得するだけで衝突するかどうかを判定することは困難であり、図1(右)のように、地図データと関連付けて判定を行う必要がある。
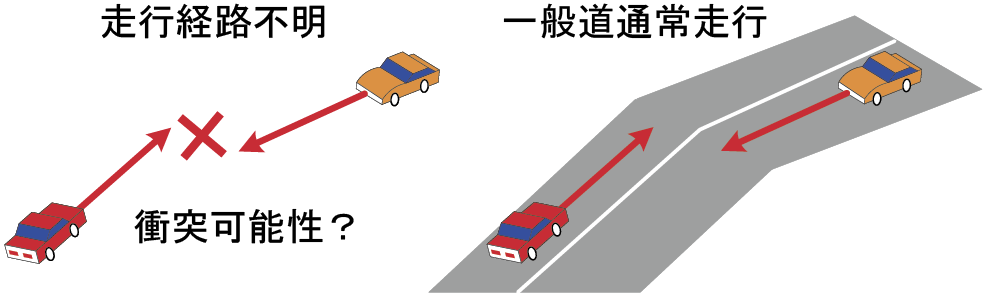 図1 V2X通信衝突回避における地図データの必要性例
図1 V2X通信衝突回避における地図データの必要性例
自動運転車両にV2X通信機能を搭載し、複数車両の走行調停など、協調型自動運転の検討(2)も行われているが、複数のメーカの車両間で協調型自動運転を実現するためには、地図データを含め共通のデータ管理を行うプラットフォームが必要となる。広範囲の車両の情報をクラウドのサーバに集約する場合、車両台数の増加に伴う計算資源や通信帯域の不足といったスケーラビリティの課題が懸念される。
工部大学校の「機械学」教育機器(機械遺産第100号)
機構模型:てこクランク往復運動
年代未詳/真鍮、鉄、木製台座/H270, W365, D180(mm)/東京大学総合研究博物館所蔵
工科大学もしくは工学部の備品番号「工キ學ニ二一七」の木札付。台座裏面に「百四拾九」と墨書あり。本模型の年代は未詳であるが、東京大学総合研究博物館には工部大学校を示すプレート付きのものを含め、近代的な機械学教育のために明治期以降に導入された機構模型が現存する。
上野則宏撮影/東京大学総合研究博物館写真提供/インターメディアテク展示・収蔵
[東京大学総合研究博物館]