
特集 日本のモノづくり再興Part2-日本機械学会の役割-
〈コア技術〉車載用電磁比例制御弁の開発と適用
はじめに
電磁比例制御弁の歴史は射出成形機などの産業機械分野では比較的古く1970年代に始まる。その後、小型の比例ソレノイドが開発され、車載用としての適用が始まるのは、1980年代の半ば以降のことである。川崎重工業(株)では、1987年に農業トラクタ用電磁比例制御弁を開発し、量産を開始した。その後、電磁比例制御弁はフォークリフト、道路機械、高所作業車などの産業用車両、ショベル、クレーンなどの建設機械に適用範囲を広げ、現在では当社のモーションコントロール事業を支えるコア・コンポーネントの一つとなっている。
本稿では、当社の車載用電磁比例制御弁の開発動向と適用事例を紹介する。
農業機械
農業用トラクタ作業機の自動制御
油圧が農業機械に採用されたのは、1920年にファーガソンにより開発された油圧式トラクタに始まる。当初はオペレータの手動レバー操作で、作業機を昇降させるだけの単純なシステムであったが、後に改良されて、レバー操作に追従して作業機位置を制御するポジションコントロールや、耕うん深さの自動調整によりトラクタの牽引力を一定に保つドラフトコントロールが可能になった。図1はドラフト、ポジション複合コントロールの作用図である(1)。レバーBでDをFの位置におくとばねSのたわみが弁に伝わりドラフトコントロールに、DをEの位置に置くとリフトアーム軸の角度が弁に伝わりポジションコントロールになる。その中間が複合コントロールである。
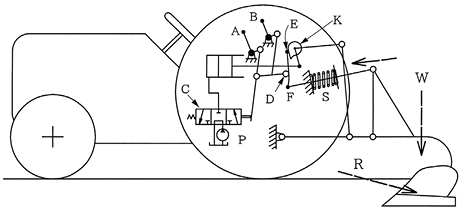 図1 ドラフト、ポジション複合コントロール
図1 ドラフト、ポジション複合コントロール
農業用トラクタ作業機の電子油圧制御
1980年代になると電子制御技術の発達により、農業用トラクタ作業機の電子油圧制御が普及し始めた。KTEM8はトラクタ作業機の昇降制制御弁である(図2)。当社初の車載用電磁比例制御弁であり、1987年に最初のシリーズの量産を開始した(2)。
主な特長としては、①中立時リーク量僅少、②微小流量制御時の高応答性、③高い耐コンタミ性があげられる(3)。特長①は負荷保持状態でのポンプ圧アンロード性能(省エネ性)に、②はトラクタの整地精度向上に、③はミッションオイルを作動油として使用する油圧系の作動信頼性に深く関わる。これらの特長により、国内の農業用トラクタに広く採用され、トラクタの高性能化、高機能化に大いに貢献することができた。図3(1)(3)にKTEM8の使用例を示す。基本的には作業機用シリンダ(単動)の昇降制御と、中立保持を行うものである。また、本機からのフィードバック信号の切り換えにより、作業機のポジションコントロール、プラウ耕うん時のドラフトコントロール、ロータリ耕うん時の耕深制御を行うことができる。図4はKTEM8を搭載した農業用トラクタの一例である。
 図2 農業トラクタ用電磁比例制御弁KTEM8
図2 農業トラクタ用電磁比例制御弁KTEM8

図3 トラクタ作業機の電子油圧制御

図4 農業用トラクタ(プラウ耕うん作業)〔井関農機(株)〕
産業車両
フォークリフト用 KMC10(L)
バッテリー式フォークリフト用コントロール弁として1992年にKMC10を開発した。リーチ型フォークリフトのオプション機能として、フォークを設定した高さに自動停止させる「揚高自動停止機能」、ワンタッチでフォークの水平設定を行う「水平自動停止機能」がある。これらの機能を実現するための電子油圧制御システムにKMC10が採用された。
1999年にはリフト連とチルト連にロック弁を内蔵したKMC10Lを開発した。KMC10Lは中立時の負荷保持性能が優れており、国内主要メーカーのカウンター型フォークリフト(図5)標準仕様車に採用された。2006年には同社カウンター型フォークリフトのモデルチェンジに合わせて、KMC10L改良型を開発、量産化した(図6) (4)。
KMC10L改良型はステアリング回路用の優先弁と、リフト下降最大速度規制用フロコン弁を内蔵している。図7にKMC10L改良型を搭載したカウンター型フォークリフトの油圧回路例を示す。
 図5 カウンター型フォークリフト(コマツ)
図5 カウンター型フォークリフト(コマツ)

図6 電磁比例マルチコントロール弁KMC10L 改良型

図7 KMC10L改良型 搭載フォークリフト油圧回路例
高所作業車用 KMP10
KMP10(図8)は圧力補償付電磁比例マルチコントロール弁であり、1997年に道路機械用として開発、1999年に高所作業車用に適用拡大した。
「圧力補償付」のメリットは、複数のアクチュエータに対する同時操作においても、制御流量が各々の負荷圧力に影響されないことである。これにより、負荷圧力の検出とフィードバックが不要となり、シンプルな制御系を構成することができる。
図9に標準的な高所作業車用KMP10の油圧回路を示す。
図10に示す作業台の水平移動と垂直移動はそれぞれ1本の操作レバーで行われる。例えば水平移動ではブーム起伏、伸縮、旋回の全アクチュエータを統合的に制御する必要がある。コントロール弁としては、アクチュエータの負荷圧力に影響されず同時操作の可能な圧力補償付電磁比例マルチコントロール弁が適している(4)。
 図8 圧力補償付電磁比例マルチコントロール弁KMP10
図8 圧力補償付電磁比例マルチコントロール弁KMP10

図9 高所作業車用KMP10油圧回路図

図10 高所作業車作業台の垂直/水平/斜め上下移動〔(株)タダノ〕
建設機械
油圧ショベルの電子制御化
油圧ショベルやクレーンなどの建設機械では、フォークリフトや農業トラクタのように作業機系統を含めた全電子油圧制御には至らず、安全性やイージーオペレーションを指向した部分的な電子油圧制御が採用されてきた。その理由は、アクチュエーターの数が多く制御システムが複雑になること、電子油圧制御システムの信頼性などが考えられる。しかしながら、これらの問題点は克服されつつあり、一部の建設機械で全電子油圧制御が採用され始めた。以下では、主に油圧ショベルについて記載する。
電子制御化以前の全油圧式ショベルでは、各油圧機器の性能とそれらの組み合わせにより、操作性向上、燃費向上が図られてきた。当社もポンプ、モータ、コントロール弁、パイロット操作弁などの油圧機器でそれに貢献してきた。2000年代になると、コントローラによって油圧機器の一部を電子制御することにより、操作性、燃費の更なる向上が図られてきた。さらに近年では、建設業就業者の高齢化や熟練者の離職などによる労働力不足が深刻な課題となってきており、ICT/IoT技術などを活用したi-Constructionによる建設産業の効率化の取り組みが進められている。建設機械メーカーは情報化施工に対応したマシンコントロール(半自動/全自動)機能を備えた油圧ショベルを開発しており、それらを実現するために油圧機器には電子制御化が必要となり(図11)(5)、当社では、油圧機器の全電子制御化に対応したポンプ、コントロール弁、パイロット操作弁を含む製品を開発して提供している。
 図11 ICT建機(油圧ショベル)のシステム構成
図11 ICT建機(油圧ショベル)のシステム構成
油圧ショベル用バルブの電子制御化
油圧ショベル用バルブとしては、オペレータの操作指令を伝えるパイロット操作弁、その操作指令を受けて油圧ポンプが吐出した作動油を走行や旋回などの油圧モータあるいはブーム・アーム・バケットなどを駆動する各シリンダに振り分け、操作指令に応じて各アクチュエータの速度を調整する役割を持つコントロール弁などがある。これらのバルブが電子制御化に対応するためには、コントローラからの指令信号を油圧信号に変換して正確かつ応答良く各アクチュエータを作動させるだけでなく、さまざまな負荷条件において安定した性能を発揮させる必要がある。
コントロール弁については、図12(6)に示すように、従来の油圧パイロット操作弁で駆動していたスプールなどの内部部品を電磁比例減圧弁で駆動することで対応しており、電磁比例弁を搭載したコントロール弁「KMXシリーズ」(図13-a)を開発して提供している(6)。
また、パイロット操作弁については、当社油圧パイロット弁「PV シリーズ」はその性能および操作性、信頼性において高い評価を得てきた。当社の電気ジョイスティック「ERUシリーズ」(図13-b)は、PVシリーズで蓄積された技術を活かし、優れた耐久性、信頼性、耐環境性を実現し、油圧ショベルを中心に多くの実績を有している。
 図12 スプールの電子制御化
図12 スプールの電子制御化
 (a)「KMXシリーズ」(b)「ERUシリーズ」
(a)「KMXシリーズ」(b)「ERUシリーズ」
図13 当社電子制御対応バルブ(例)
おわりに
多くの産業分野において自動化、情報化施工対応が進んでおり、当社としては長年培ってきた油圧技術への電子制御技術の融合をさらに深化させ、将来進化した作業機械に最適な製品の開発を行い、各産業分野の発展に貢献していく。
参考文献
(1) 川村登, 藤浦建史, プラウ, ロータリ耕の自動制御, 農業機械学会誌, vol.42, No.4(1980), pp.603-607.
(2) 伊藤登, 富樫義雄, 吉川博志, 村岡英泰, 産業車両用制御弁の開発と適用, 川崎重工技報, No.156( 2004) ,pp.22-27.
(3) 青木誠司 , トラクタ用電磁比例制御弁 , 油空圧技術 , vol.44, No.6( 2005), pp.52-56.
(4) 伊藤登, 平成における車載用電磁比例制御弁の開発動向, 油空圧技術, vol.57, No.11(2018), pp.15-20.
(5) 村岡英泰, 弓達陽治, 中川仁, 陵城孝志, 能勢知道, 情報化施工を実現するICT 油圧ショベル用システムの開発 , 川崎重工技報 , No.181( 2019), pp.6-9.
(6) 松尾政浩, 吉村勇, 東出善之, 清水博明, 西嶋康人, 情報化施工を実現するICT 油圧ショベル用コンポーネントの開発 , 川崎重工技報 , No.181( 2019), pp.10-13.
伊藤 登
◎川崎重工業(株) 精密機械・ロボットカンパニー 精密機械ディビジョン 技術総括部 機器第二技術部 バルブ設計一課
東出 善之
◎川崎重工業(株) 精密機械・ロボットカンパニー 精密機械ディビジョン 技術総括部 機器第二技術部 MCV設計課 基幹職
工部大学校の「機械学」教育機器(機械遺産第100号)
機構模型:差動歯車
年代未詳/真鍮、鉄、ガラス、木製台座/H310, W245, D235(mm)/東京大学総合研究博物館所蔵
工科大学もしくは工学部の備品番号「工キ學ニ一八五」の木札付。本模型の年代は未詳であるが、東京大学総合研究博物館には工部大学校を示すプレート付きのものを含め、近代的な機械学教育のために明治期以降に導入された機構模型が現存する。
上野則宏撮影/東京大学総合研究博物館写真提供/インターメディアテク展示・収蔵
[東京大学総合研究博物館]